17. Приведите классификацию электроприводов по количеству двигателей, опишите преимущества индивидуального электропривода.
По количеству используемых электродвигателей электропривод бывает групповой, индивидуальный и взаимосвязанный.
В групповом приводе один электродвигатель приводит в движение с помощью разветвленной передачи группу механизмов или группу рабочих органов одного механизма. Кинематическая схема такого привода оказывается громоздкой, а сам привод неэкономичен, поэтому находит ограниченное применение.
В индивидуальном приводе электродвигатель приводит в движение только один рабочий орган.
Преимущества: кинематическая схема механизма с индивидуальным приводом существенно упрощается за счет отсутствия системы передач, повышается экономичность и снижается металлоемкость механизма. Электродвигатель может встраиваться непосредственно в механизм.
Взаимосвязанный привод представляет собой два или несколько механически или электрически связанных между собой индивидуальных электроприводов, работающих совместно на один или несколько исполнительных органов.
18. Дайте понятие механических характеристик электродвигателей, приведите примеры характеристик.
Механической характеристикой электродвигателя называется зависимость угловой скорости от электромагнитного момента на валу двигателя
w = f (M)
Механические характеристики электродвигателей могут быть представлены как M = f(w).
Различают естественную и искусственную характеристики электродвигателей. Естественная характеристика соответствует основной схеме включения электродвигателя и номинальным параметрам питающего напряжения.
Если двигатель включен не по основной схеме, или в его электрические цепи включены дополнительные элементы, или же двигатель питается напряжением с неноминальными параметрами, то он будет иметь искусственные характеристики.
Примеры механических характеристик различных типов электродвигателей: 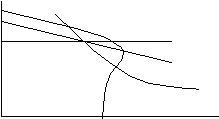
1 – механическая характеристика синхронного двигателя;
2 — механическая характеристика двигателя постоянного тока независимого возбуждения;
3 — механическая характеристика асинхронного двигателя;
4 — механическая характеристика двигателя постоянного тока последовательного возбуждения.
19. Опишите частотный электропривод и его преимущества
Основной недостаток асинхронных электродвигателей – сложность регулирования их скорости традиционными методами (изменением питающего напряжения, введением дополнительных сопротивлений в цепь обмоток).
В настоящее время преобразователи частоты являются наиболее совершенными устройствами управления асинхронным приводом.
Принцип частотного метода регулирования скорости АД заключается в том, что, изменяя частоту f1 питающего напряжения, можно изменять скорость магнитного поля статора  .
.

Этот способ обеспечивает плавное регулирование скорости в широком диапазоне, а механические характеристики обладают высокой жесткостью. Регулирование скорости при этом не сопровождается увеличением потерь мощности.
Для получения высоких энергетических показателей АД – необходимо одновременно с частотой изменять и подводимое напряжение. Поэтому для плавного бесступенчатого регулирования частоты вращения вала асинхронного электродвигателя, преобразователь частоты должен обеспечивать одновременное регулирование частоты и напряжения на статоре АД.
Применение регулируемого электропривода обеспечивает энергосбережение и позволяет получать новые качества систем и объектов. Значительная экономия электроэнергии обеспечивается за счет регулирования какого-либо технологического параметра. Если это транспортер или конвейер, то можно регулировать скорость его движения; если это насос или вентилятор – можно поддерживать давление или регулировать производительность и т.д.
Тест «Основы электропривода»

Режим работы электродвигателя, при котором рабочие периоды с неизменной номинальной нагрузкой чередуются с периодами отключения машины; при этом периоды нагрузки (рабочие периоды) недлительны и превышение температуры не достигает установившегося значения, а периоды паузы позволяют двигателю охладиться до температуры окружающей среды называется…
Варианты ответов
- кратковременный
- повторно-кратковременный
- продолжительный
Вопрос 13
Режим работы электродвигателя, при котором периоды неизменной номинальной нагрузки (рабочие периоды) чередуются с периодами отключения машины (паузами), причем как рабочие периоды, так и паузы не настолько длительны, чтобы превышение температуры могло достигнуть установившихся значений как при нагреве, так и при охлаждении называется…
Варианты ответов
- продолжительный
- кратковременный
- повторно-кратковременный
Вопрос 14
ГОСТом установлено, что для повторно-кратковременного режима работы электродвигателя продолжительность цикла не превышает…
Варианты ответов
- 5 мин
- 15 мин
- 20 мин
- 10 мин
Вопрос 15
Промышленность выпускает электродвигатели со стандартной продолжительностью рабочего периода…
Варианты ответов
- 20, 40, 70 и 100 мин
- 15, 30, 60 и 90 мин
- 5, 15, 25 и 50 мин
- 1, 3, 5 и 9 мин
Вопрос 16
В каком режиме работают электроприводы кранов, лифтов, лебедок?
Варианты ответов
- В продолжительном режиме
- В повторно- кратковременном режиме
- В кратковременном режиме
Вопрос 17
Электроприводы разводных мостов, шлюзов предназначены для работы:
Варианты ответов
- В продолжительном режиме
- В повторно- кратковременном режиме
- В кратковременном режиме
Вопрос 18
При каком режиме работы электропривода двигатель должен рассчитываться на максимальную мощность?
Варианты ответов
- В продолжительном режиме
- В повторно- кратковременном режиме
- В кратковременном режиме
Вопрос 19
Продолжительный режим работы электропривода не свойственен…
Электроприводы насосов вентиляторов компрессоров нуждаются в электродвигателях
Электроприводы насосов вентиляторов компрессоров нуждаются в электродвигателях
Насосные, вентиляционные и компрессорные установки широко применяются на строительных площадках и предприятиях строительной индустрии.
В рассматриваемых установках небольшой мощности в основном применяются асинхронные трехфазные электродвигатели с короткозамкнутым или фазным ротором, работающим на напряжении 380/220 в, в защищенном или закрытом исполнении. При мощности электродвигателей свыше 150 обычно применяют высоковольтные двигатели, а при мощности свыше 200 кет иногда целесообразнее использовать синхронные двигатели.
В строительной практике обычно не требуется регулирования скорости насосов, вентиляторов или компрессоров. В случае необходимости такого регулирования используются асинхронные двигатели с фазным ротором и пускорегулировочным реостатом или асинхронные двигатели с дросселями насыщения.
Рекламные предложения на основе ваших интересов:
Насосы и вентиляторы являются высокоскоростными механизмами, что позволяет в большинстве случаев осуществлять прямое соединение вала двигателя с валом механизма. Компрессоры, обычно поршневого типа, используемые в строительной практике, являются тихоходными механизмами, что приводит к необходимости применять ту или иную передачу со шкива двигателя на шкив механизма.
Насосные, вентиляторные и компрессорные установки относительно легко автоматизируются, что целесообразно предусматривать при проектировании новых и реконструкции действующих установок.
При разработке автоматизации данных установок следует учитывать автоматизацию работы механизмов, обеспечивающих основной технологический процесс, и автоматизацию вспомогательных механизмов. В первом случае имеются в виду процессы подачи воды, технологических растворов и воздуха определенных параметров в соответствии с графиком потребления. Эти параметры определяют время пуска, остановки и регулирования производительности основных механизмов. Во втором случае предполагается автоматизация работы различного рода задвижек, вспомогательных вентиляторов, двигателей встряхивания фильтров и др.
Автоматизация осуществляется в результате получения импульсов на изменение в рабочей схеме от соответствующих датчиков. В основном эти датчики при управлении насосами, вентиляторами и компрессорами реагируют на изменения неэлектрических величин, таких, как давление в водяных и воздушных магистралях температура, влажность или на прекращение протекания воды или газов. Соответствующие изменения отмечаются различной аппаратурой: измерительными приборами и реле, которые через промежуточную аппаратуру воздействуют на схему управления.
Какие направления характерны для совершенствования элементной базы электроники?
а) Повышение надежности б) Снижение потребления мощности
в) Миниатюризация г) Все перечисленные
Укажите полярность напряжения на эмиттере и коллекторе транзистора типа p-n-p.
в) плюс, минус г) минус, минус
Каким образом элементы интегральной микросхемы соединяют между собой?
а) Напылением золотых или алюминиевых дорожек через окна в маске б) Пайкой лазерным лучом
г) Всеми перечисленными способами
Какие особенности характерны как для интегральных микросхем (ИМС) , так и для больших интегральных микросхем(БИС)?
а) Миниатюрность б) Сокращение внутренних соединительных линий
в) Комплексная технология г) Все перечисленные
Как называют средний слой у биполярных транзисторов?
Сколько p-n переходов содержит полупроводниковый диод?
Как называют центральную область в полевом транзисторе?
Сколько p-n переходов у полупроводникового транзистора?
13.Управляемые выпрямители выполняются на базе:
а) Диодов б) Полевых транзисторов
в) Биполярных транзисторов г) Тиристоров
К какой степени интеграции относятся интегральные микросхемы, содержащие 500 логических элементов?
в) К высокой г) К сверхвысокой
15.Электронные устройства, преобразующие постоянное напряжение в переменное, называются:
а) Выпрямителями б) Инверторами
в) Стабилитронами г) Фильтрами
Какими свободными носителями зарядов обусловлен ток в фоторезисторе?
Раздел 9 «Электропривод»
Механическая характеристика двигателя постоянного тока последовательного возбуждения.
в) Абсолютно жесткая г) Асинхронная
2.Электроприводы крановых механизмов должны работать при:
а) Переменной нагрузке б) Постоянной нагрузки
в) Безразлично какой г) Любой
3. Электроприводы насосов, вентиляторов, компрессоров нуждаются в электродвигателях с жесткой механической характеристикой. Для этого используются двигатели:
а) Асинхронные с контактными кольцами б) Короткозамкнутые асинхронные
в) Синхронные г) Все перечисленные
Сколько электродвигателей входит в электропривод?
в) Несколько г) Количество электродвигателей зависит от
Типа электропривода
В каком режиме работают электроприводы кранов, лифтов, лебедок?
а) В длительном режиме б) В кратковременном режиме
в) В повторно- кратковременном режиме г) В повторно- длительном режиме
Какое устройство не входит в состав электропривода?
а) Контролирующее устройство б) Электродвигатель
в) Управляющее устройство г) Рабочий механизм
7.Электроприводы разводных мостов, шлюзов предназначены для работы:
а) В длительном режиме б) В повторно- кратковременном режиме
в) В кратковременном режиме г) В динамическом режиме
Какие функции выполняет управляющее устройство электропривода?
а) Изменяет мощность на валу рабочего механизма
б) Изменяет значение и частоту напряжения
в) Изменяет схему включения электродвигателя, передаточное число, направление вращения г) Все функции перечисленные выше
При каком режиме работы электропривода двигатель должен рассчитываться на максимальную мощность?
Сколько электродвигателей входит в электропривод
Электрический привод. Виды, устройство и история электропривода
Электрический привод – это электромеханическая система, состоящая из электродвигательного, преобразовательного и управляющего устройств, предназначенная для приведения в движение исполнительных органов рабочей машины и управления этим движением. Для выполнения этих функций электропривод вырабатывает механическую энергию за счет электрической энергии, получаемой от источника электрической энергии (сети электроснабжения).
Вырабатываемая электроприводом механическая энергия передается исполнительным органам рабочих машин и механизмов (ленте транспортера или конвейера, шпинделю токарного станка, крыльчатке насоса, кабине лифта и т. д.) и при необходимости регулируется в соответствии с технологическими требованиями к режимам работы исполнительного органа.
За счет полученной энергии исполнительный орган совершает требуемое механическое движение, обеспечивая выполнение производственных и технологических операций: перемещение грузов, обработку деталей, транспортирование жидкости и газа и т. д. Функциональная схема электропривода представлена ниже.
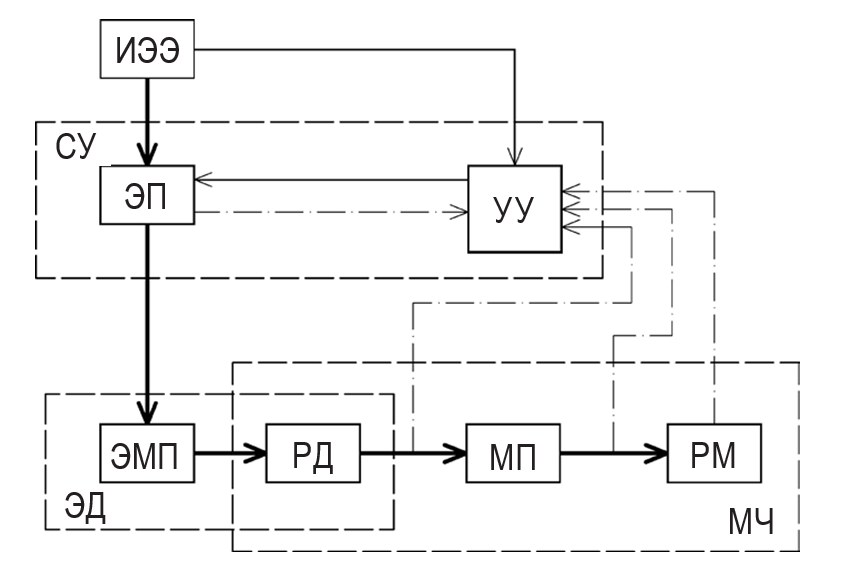
Функциональная схема электропривода: ИЭЭ – источник электрической энергии; СУ – система управления; ЭП – электрический преобразователь; УУ – управляющее устройство; ЭМП – электромеханический преобразователь; РД – ротор двигателя; МП – механический преобразователь; РМ – рабочая машина; ЭД – электрический двигатель; МЧ – механическая часть
Электропривод имеет два канала – силовой и информационный. По первому каналу транспортируется преобразуемая энергия (толстые линии), по второму осуществляются управление потоком энергии (тонкие сплошные линии), а также сбор и обработка сведений о состоянии и функционировании системы, диагностика ее неисправностей (тонкие штрихпунктирные линии).
Силовой канал состоит из двух частей – электрической и механической и обязательно содержит связующее звено – электромеханический преобразователь (ЭМП).
В электрическую часть силового канала входят устройства, передающие электрическую энергию от ее источника (ИЭЭ) к электромеханическому преобразователю и обратно и осуществляющие, если нужно, преобразование параметров электрической энергии. Механическая часть состоит из ротора двигателя (РД), подвижного органа электромеханического преобразователя, механических передач (МП), редуктора или вариатора и исполнительного органа рабочей машины (РМ), в котором полезно реализуется полученная механическая энергия.
В связи с большим ассортиментом рабочих машин электроприводы разнообразны по своему схемному и конструктивному исполнению.
По характеру движения различают электроприводы вращательного и поступательного однонаправленного и реверсивного движения, а также возвратно-поступательного движения.
Вращательное однонаправленное и реверсивное движение осуществляется электродвигателями обычного исполнения.
Поступательное движение может быть получено при использовании электродвигателя вращательного движения совместно с преобразовательным механизмом (кулисным, винтовым, реечным) либо электродвигателя специального исполнения (линейного, гидродинамического и т. д.).
По степени управляемости электроприводы подразделяют на следующие виды:
- нерегулируемый – электропривод, в котором исполнительный орган рабочей машины приводится в движение с одной постоянной скоростью;
- регулируемый – электропривод, в котором скорость движения исполнительного органа изменяется в соответствии с требованиями технологического процесса;
- следящий – электропривод, в котором воспроизводится перемещение исполнительного органа в соответствии с произвольно меняющимся задающим сигналом;
- программно-управляемый – электропривод обеспечивает перемещение исполнительного органа в соответствии с заданной программой;
- адаптивный – электропривод автоматически обеспечивает оптимальный режим движения исполнительного органа при изменении условий его работы;
- позиционный – электропривод обеспечивает регулирование положения исполнительного органа рабочей машины.
По наличию механического преобразователя электроприводы делят на редукторные (электропривод, механическая передача которого содержит редуктор) и безредукторные (электропривод, электродвигатель которого непосредственно соединен с исполнительным органом).
По виду силового электрического преобразователя различают:
- вентильный электропривод, в котором преобразовательным устройством является вентильный преобразователь энергии. Разновидность вентильного электропривода – полупроводниковый электропривод (тиристорный и транзисторный);
- систему УВ–Д – вентильный электропривод постоянного тока, преобразовательным устройством которого является управляемый выпрямитель;
- систему ПЧ–Д – вентильный электропривод переменного тока, преобразовательным устройством которого является регулируемый преобразователь частоты;
- систему Г–Д и МУ–Д – электропривод, преобразовательным устройством которого является соответственно электромашинный преобразователь или магнитный усилитель.
По роду тока различают электроприводы постоянного и переменного тока.
По способу передачи механической энергии исполнительному органу электроприводы подразделяют на следующие виды:
- индивидуальный – электропривод, в котором каждый исполнительный орган рабочей машины приводится в движение отдельным двигателем. Это наиболее распространенный вид электропривода, так как здесь упрощается кинематическая передача (в некоторых случаях она полностью исключена), легко осуществляется автоматизация технологического процесса, улучшаются условия обслуживания рабочей машины;
- взаимосвязанный – электропривод, в котором имеются два или несколько электрически или механически связанных между собой электроприводов, при работе которых поддерживается заданное соотношение их скоростей или нагрузок и положение исполнительных органов рабочих машин. Если электродвигатели взаимосвязанного электропривода работают на общий вал, привод называют многодвигательным;
- групповой – электропривод с одним электродвигателем, обеспечивающий движение исполнительных органов нескольких рабочих машин или нескольких исполнительных органов одной рабочей машины.
По уровню автоматизации различают:
- неавтоматизированный электропривод, в котором осуществляется ручное управление с помощью оператора;
- автоматизированный – электропривод, управляемый автоматическим регулированием параметров;
- автоматический – электропривод, в котором управляющее воздействие вырабатывается автоматическим устройством без участия оператора.
История электропривода и основные направления его развития
С 1819 по 1834 г. были открыты основные законы электротехники: Эрстеда (действие постоянного тока на магнитную стрелку); Ампера (взаимодействие электрических токов); Ома (связь между током, напряжением и сопротивлением в электрической цепи); Фарадея (закон электромагнитной индукции: при изменении магнитного потока в катушке индуцируется ЭДС); Ленца (закон электромагнитной инерции).
Первый практически пригодный электродвигатель постоянного тока с вращательным движением вала построил в 1834 г. Мориц Герман в Германии. Электродвигатель состоял из двух групп П-образных электромагнитов. Четыре из них, установленные на неподвижной раме, были соединены последовательно и питались током непосредственно от батареи гальванических элементов.
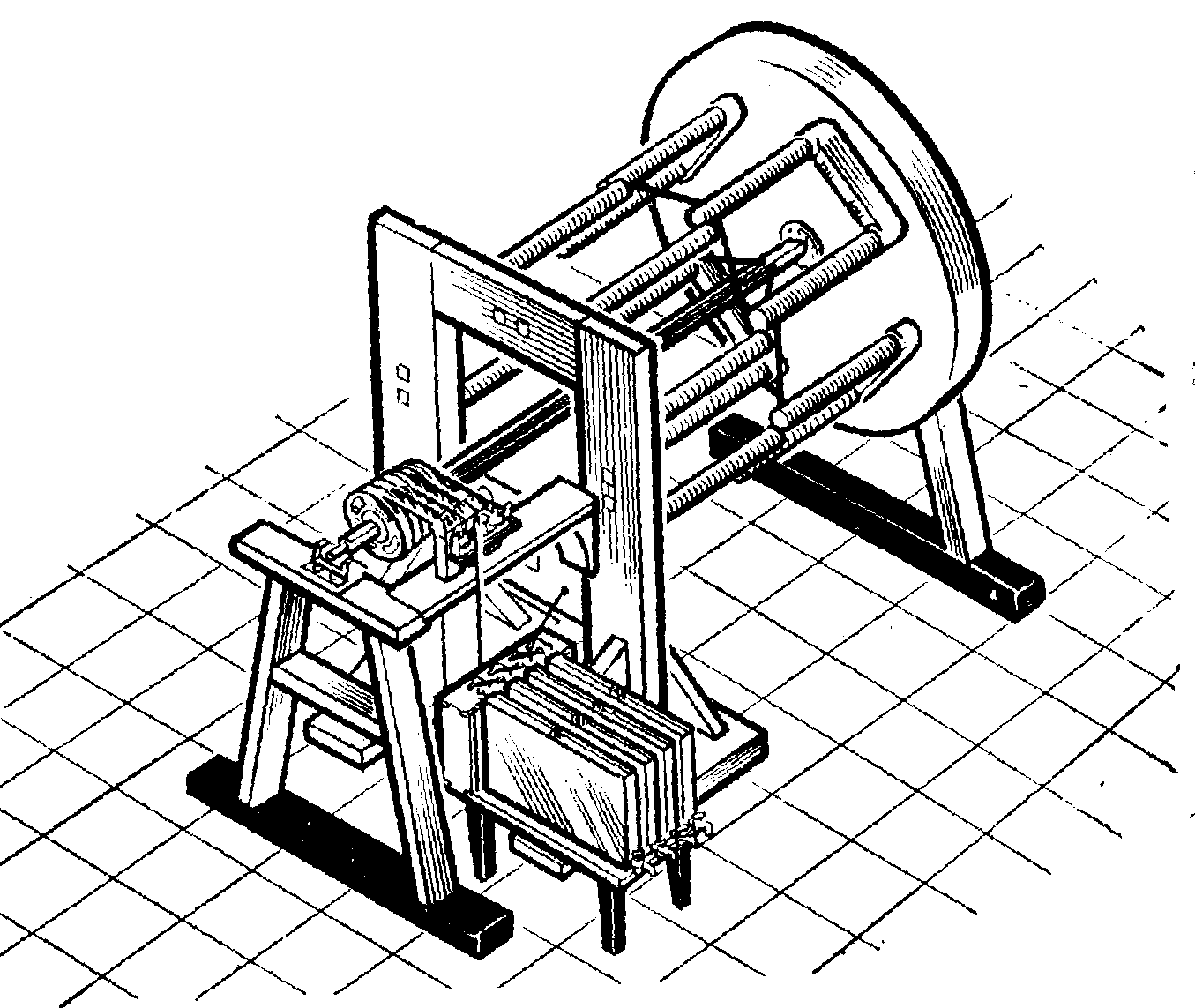
Четыре электромагнита, установленные на подвижном диске, были подключены к батарее через коммутатор. С его помощью направление тока во вращающихся электромагнитах изменялось 8 раз за один оборот диска. Мощность электродвигателя составляла около 15 Вт из-за большого (12,7 мм) воздушного зазора между вращающимися и неподвижными электромагнитами. Двигатель совершал 80–120 об/мин.
В 1837–1839 гг. Мориц Герман под именем Б.С. Якоби построил в России несколько электроприводов для лодки. Лучший из них развивал мощность 650 Вт и позволял лодке двигаться по течению со скоростью 4 км/ч, а против течения – со скоростью 2,5 км/ч, перевозя 12–14 человек. Несовершенство и малая емкость гальванических элементов надолго затормозили развитие такого электропривода.
В дальнейшем стараниями многих ученых был усовершенствован электродинамический принцип взаимодействия магнитного поля и тока в электрических машинах. В 1860 г. итальянец А. Пачинотти изобрел электродвигатель с кольцевым якорем. В 1867 г. Э.В. Сименс изобрел генератор постоянного тока с электромагнитным самовозбуждением. После создания промышленного электрического генератора (З. Грамм, 1870) электродвигатели постоянного тока получили широкое применение.
В 1880 г. Ф.А. Пироцкий в России применил двигатель постоянного тока для привода трамвайного вагона.
В 1881 г. близ Берлина уже действовала трамвайная линия, а в 1882 г. – троллейбусная линия на постоянном токе.
В 1886 г. Г. Феррарис изобрел вращающееся магнитное поле и предложил идею многофазной машины переменного тока с шестью и более фазами.
В 1889–1891 гг. русский инженер М.О. Доливо-Добровольский, работая в Германии, предложил трехфазную систему токов и основные ее составляющие – трехфазный трансформатор и трехфазный электродвигатель. С тех пор трехфазную систему токов стали широко применять, поскольку она позволяла передавать электрическую энергию на большие расстояния, легко ее трансформировать в различные по величине напряжения.
Электропривод переменного тока также стал быстро развиваться. Первая статья, посвященная электроприводу, появилась в журнале «Электричество» в 1880 г. Ее автор Д.А. Лачинов назвал статью «Электромеханическая работа», точно отображая суть электропривода.
Большой вклад в развитие электропривода внесли российские ученые С.А. Ринкевич, В.К. Попов, А.Т. Голован, Д.П. Морозов, М.Г. Чиликин, А.С. Сандлер, В.П. Андреев, Ю.А. Сабинин, Л.Б. Гейлер, С.Н. Вешеневский, Н.Ф. Ильинский и многие другие. Созданный институт «ВНИИэлектропривод» внес большой вклад в развитие электропривода.
На сегодняшний день можно выделить следующие основные направления развития электропривода.
Электропривод развивается в сторону повышения точности и удобства управления. Повышение технологических требований к динамическим и точностным показателям электропривода, расширение и усложнение его функций, связанных с управлением технологическими процессами, и соответствующее возрастание сложности систем управления электроприводами диктует создание систем числового программного управления и расширение использования современной вычислительной техники, создаваемой непосредственно для целей управления на базе микропроцессоров.
Развитие электропривода характеризуется тенденцией к упрощению кинематических цепей машин и механизмов, обусловленной развитием регулируемого индивидуального электропривода. Одно из проявлений этой тенденции – стремление в машиностроении к использованию безредукторного электропривода. Несмотря на повышенные массу и габариты двигателя, применение безредукторных электроприводов оправдано их большей надежностью и быстродействием.
Интересной реализацией рассмотренной тенденции является развитие электроприводов с линейными двигателями, которые позволяют исключить не только редуктор, но и устройства, преобразующие вращательное движение роторов двигателей в поступательное движение рабочих органов машин. Электропривод с линейным двигателем – органическая часть общей конструкции машины, значительно упрощает кинематику и создает максимальное удобство для оптимального конструирования машин с поступательным движением рабочих органов.
Электропривод развивается в сторону экономичности. Особенно острой является проблема рационального проектирования электроприводов с точки зрения энергопотребления. Специалисты считают, что сегодня сэкономить единицу энергетических ресурсов (например, 1 т условного топлива) вдвое дешевле, чем ее добыть. В перспективе это соотношение будет изменяться: добывать топливо становится все труднее, а запасы его все убывают.
Тест «Основы электропривода»
Режим работы электродвигателя, при котором рабочие периоды с неизменной номинальной нагрузкой чередуются с периодами отключения машины; при этом периоды нагрузки (рабочие периоды) недлительны и превышение температуры не достигает установившегося значения, а периоды паузы позволяют двигателю охладиться до температуры окружающей среды называется…
Варианты ответов
- кратковременный
- повторно-кратковременный
- продолжительный
Вопрос 13
Режим работы электродвигателя, при котором периоды неизменной номинальной нагрузки (рабочие периоды) чередуются с периодами отключения машины (паузами), причем как рабочие периоды, так и паузы не настолько длительны, чтобы превышение температуры могло достигнуть установившихся значений как при нагреве, так и при охлаждении называется…
Варианты ответов
- продолжительный
- кратковременный
- повторно-кратковременный
Вопрос 14
ГОСТом установлено, что для повторно-кратковременного режима работы электродвигателя продолжительность цикла не превышает…
Варианты ответов
- 5 мин
- 15 мин
- 20 мин
- 10 мин
Вопрос 15
Промышленность выпускает электродвигатели со стандартной продолжительностью рабочего периода…
Варианты ответов
- 20, 40, 70 и 100 мин
- 15, 30, 60 и 90 мин
- 5, 15, 25 и 50 мин
- 1, 3, 5 и 9 мин
Вопрос 16
В каком режиме работают электроприводы кранов, лифтов, лебедок?
Варианты ответов
- В продолжительном режиме
- В повторно- кратковременном режиме
- В кратковременном режиме
Вопрос 17
Электроприводы разводных мостов, шлюзов предназначены для работы:
Варианты ответов
- В продолжительном режиме
- В повторно- кратковременном режиме
- В кратковременном режиме
Вопрос 18
При каком режиме работы электропривода двигатель должен рассчитываться на максимальную мощность?
Варианты ответов
- В продолжительном режиме
- В повторно- кратковременном режиме
- В кратковременном режиме
Вопрос 19
Продолжительный режим работы электропривода не свойственен…
Электрический привод
Электрический привод (сокращённо — электропривод) — это электромеханическая система для приведения в движение исполнительных механизмов рабочих машин и управления этим движением в целях осуществления технологического процесса.
Современный электропривод — это совокупность множества электромашин, аппаратов и систем управления ими. Он является основным потребителем электрической энергии (до 60 %) [1] и главным источником механической энергии в промышленности.
Определение по ГОСТу Р 50369-92 [2] Электропривод — электромеханическая система, состоящая из преобразователей электроэнергии, электромеханических и механических преобразователей, управляющих и информационных устройств и устройств сопряжения с внешними электрическими, механическими, управляющими и информационными системами, предназначенная для приведения в движение исполнительных органов рабочей машины и управления этим движением в целях осуществления технологического процесса.
Как видно из определения, исполнительный орган в состав привода не входит. Однако, авторы авторитетных учебников [1] [3] включают исполнительный орган в состав электропривода. Это противоречие объясняется тем, что при проектировании электропривода необходимо учитывать величину и характер изменения механической нагрузки на валу электродвигателя, которые определяются параметрами исполнительного органа. При невозможности реализации прямого привода электродвигатель приводит исполнительный орган в движение через кинематическую передачу. КПД, передаточное число и пульсации, вносимые кинематической передачей также учитываются при проектировании электропривода.
Содержание
Функциональная схема
- Регулятор (Р) предназначен для управления процессами, протекающими в электроприводе.
- Электрический преобразователь (ЭП) предназначен для преобразования электрической энергии сети в регулируемое напряжение постоянного или переменного тока.
- Электромеханический преобразователь (ЭМП) — двигатель, предназначен для преобразования электрической энергии в механическую.
- Механический преобразователь (МП) может изменять скорость вращения двигателя, а также характер движения (с поступательного на вращательное или с вращательного на поступательное).
- Упр — управляющее воздействие.
- ИО — исполнительный орган.
- Силовая часть или электропривод с разомкнутой системой регулирования.
- Механическая часть. электропривода.
Характеристики привода
Статические характеристики
Под статическими характеристиками чаще всего подразумеваются электромеханическая и механическая характеристика.
Механическая характеристика
Механическая характеристика — это зависимость угловой скорости вращения вала от электромагнитного момента M (или от момента сопротивления Mc). Механические характеристики являются очень удобным и полезным инструментом при анализе статических и динамических режимов электропривода. [1]
Электромеханическая характеристика двигателя
Электромеханическая характеристика — это зависимость угловой скорости вращения вала ω от тока I.
Динамическая характеристика
Динамическая характеристика электропривода — это зависимость между мгновенными значениями двух координат электропривода для одного и того же момента времени переходного режима работы.
Классификация электроприводов [4]
По количеству и связи исполнительных, рабочих органов.
- Индивидуальный, в котором рабочий исполнительный орган приводится одним самостоятельным двигателем, приводом.
- Групповой, в котором один двигатель приводит в действие исполнительные органы РМ или несколько органов одной РМ.
- Взаимосвязанный, в котором два или несколько ЭМП или ЭП электрически или механически связаны между собой с целью поддержания заданного соотношения или равенства скоростей, или нагрузок, или положения исполнительных органов РМ.
- Многодвигательный, в котором взаимосвязанные ЭП, ЭМП обеспечивают работу сложного механизма или работу на общий вал.
- Электрический вал, взаимосвязанный ЭП, в котором для постоянства скоростей РМ, не имеющих механических связей, используется электрическая связь двух или нескольких ЭМП.
По типу управления и задаче управления.
- Автоматизированный ЭП, управляемый путём автоматического регулирования параметров и величин.
- Программно-управляемый ЭП, функционирующий через посредство специализированной управляющей вычислительной машины в соответствии с заданной программой.
- Следящий ЭП, автоматически отрабатывающий перемещение исполнительного органа РМ с заданной точностью в соответствии с произвольно меняющимся сигналом управления.
- Позиционный ЭП, автоматически регулирующий положение исполнительного органа РМ.
- Адаптивный ЭП, автоматически избирающий структуру или параметры устройства управления с целью установления оптимального режима работы.
По характеру движения.
- ЭП с вращательным движением.
- Линейный ЭП с линейными двигателями.
- Дискретный ЭП с ЭМП, подвижные части которого в установившемся режиме находятся в состоянии дискретного движения.
По наличию и характеру передаточного устройства.
- Редукторный ЭП с редуктором или мультипликатором.
- Электрогидравлический с передаточным гидравлическим устройством.
- Магнитогидродинамический ЭП с преобразованием электрической энергии в энергию движения токопроводящей жидкости.
По роду тока.
- Переменного тока.
- Постоянного тока.
По степени важности выполняемых операций.
- Главный ЭП, обеспечивающий главное движение или главную операцию (в многодвигательных ЭП).
- Вспомогательный ЭП.
Подбор электродвигателя
Качество работы современного электропривода во многом определяется правильным выбором используемого электрического двигателя, что в свою очередь обеспечивает продолжительную надёжную работу электропривода и высокую эффективность технологических и производственных процессов в промышленности, на транспорте, в строительстве и других областях.
При выборе электрического двигателя для привода производственного механизма руководствуются следующими рекомендациями:
- Исходя из технологических требований, производят выбор электрического двигателя по его техническим характеристикам (по роду тока, номинальным напряжению и мощности, частоте вращения, виду механической характеристики, продолжительности включения, перегрузочной способности, пусковым, регулировочным и тормозным свойствами др.), а также конструктивное исполнение двигателя по способу монтажа и крепления.
- Исходя из экономических соображений, выбирают наиболее простой, экономичный и надёжный в эксплуатации двигатель, не требующий высоких эксплуатационных расходов и имеющий наименьшие габариты, массу и стоимость.
- Исходя из условий окружающей среды, в которых будет работать двигатель, а также из требований безопасности работы во взрывоопасной среде, выбирают конструктивное исполнение двигателя по способу защиты.
Правильный выбор типа, исполнения и мощности электрического двигателя определяет не только безопасность, надёжность и экономичность работы и длительность срока службы двигателя, но и технико-экономические показатели всего электропривода в целом.
Алгоритм выбора электропривода
Для некоторых механизмов, работающих в повторно-кратковременном режиме (краны, лифты), большую часть рабочего цикла двигатель работает на естественной характеристике и только относительно небольшое время работает на искусственной характеристике, обычно на пониженной частоте вращения. В этом случае потери электроэнергии на искусственной характеристике сравнительно невелики, так как мало время работы на ней. Поэтому здесь можно применять простые и дешёвые способы регулирования, даже если они вызывают повышенные потери мощности в обмотках. Поэтому, благодаря простоте реализации метода регулирования скорости путём изменения сопротивления в цепи ротора, такие электроприводы нашли наиболее широкое применение в крановых системах, и сейчас составляют основную часть находящихся в эксплуатации и выпускаемых промышленностью электроприводов. В то же время растет число электроприводов с плавным регулированием скорости, в первую очередь к ним относятся электроприводы по системам «тиристорный преобразователь — двигатель постоянного тока» (ТП-Д) и «преобразователь частоты — асинхронный двигатель» (ПЧ-АД).
Основными типами электродвигателей, которые используются для привода производственных механизмов с регулируемой скоростью движения рабочего органа, являются двигатели постоянного тока и асинхронные с короткозамкнутым или фазным ротором. Наиболее просто требуемые искусственные характеристики получаются у двигателей постоянного тока, поэтому до недавнего времени [когда?] они преимущественно и находили применение для регулируемых электроприводов. С другой стороны, асинхронные двигатели, уступая двигателям постоянного тока по возможностям регулирования частоты вращения, по сравнению с последними проще в изготовлении и эксплуатации и имеют относительно меньшие массу, размеры и стоимость. Именно эти отличительные свойства асинхронных двигателей определили их главенствующее использование в промышленном нерегулируемом электроприводе. В настоящее время двигатели постоянного тока вытесняются короткозамкнутыми асинхронными двигателями с преобразователями частоты, а также синхронными двигателями с постоянными магнитами на роторе и шаговыми. Число выпускаемых двигателей постоянного тока составляет лишь 4-5 % числа двигателей переменного тока и неуклонно снижается [источник не указан 632 дня] .