Регулятор оборотов коллекторного двигателя TDA1085

Попросили меня собрать регулятор оборотов коллекторного двигателя от стиральной машины на микросхеме TDA1085. Регулятор исправно заработал, но при сборке кое что мне не понравилось в плате и схеме. Почитав про эту микросхему я скорректировал электрическую схему и разработал свою печатную плату.
Схема регулятора оборотов получилась вот такая.
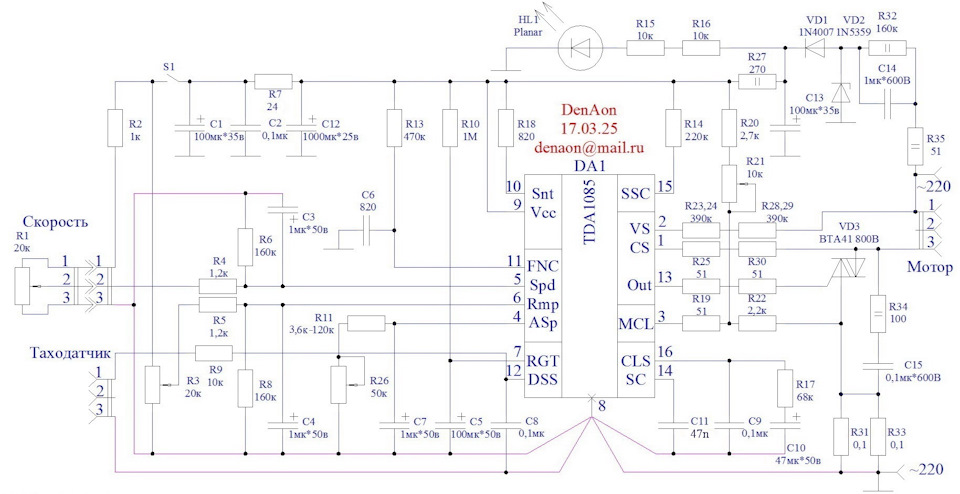 Схема электрическая принципиальная
Схема электрическая принципиальная
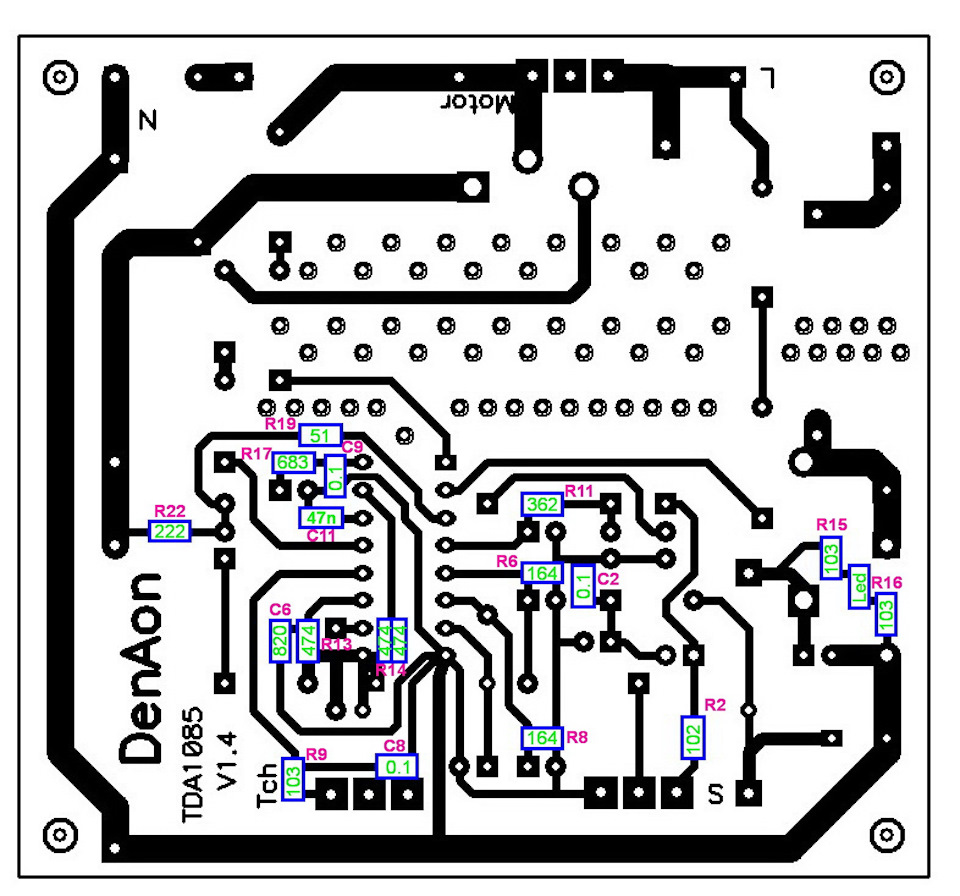
Для устройства разработа двухсторонняя печатная плата. Некоторые резисторы и конденсаторы использованы в исполнении для поверхностного монтажа. В отличии от распространенных в интернете схеме и плате, в моей по возможности разнесены высоковольтные и низковольтные цепи, "земля" разведена в соответствии с рекомендациями документов на микросхему. Вот так выглядит готовая плата изготовленная на заводе.
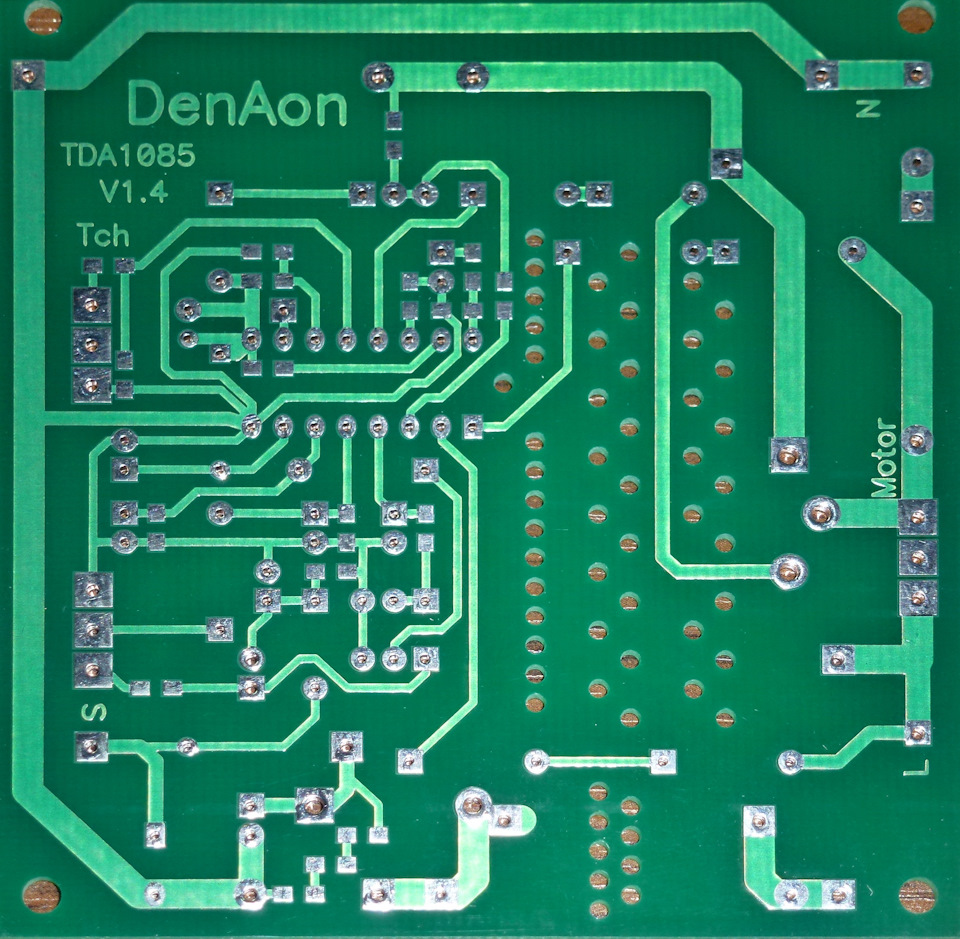 Плата регулятора оборотов коллекторного двигателя
Плата регулятора оборотов коллекторного двигателя
Один из вариантов собранной платы регулятора.
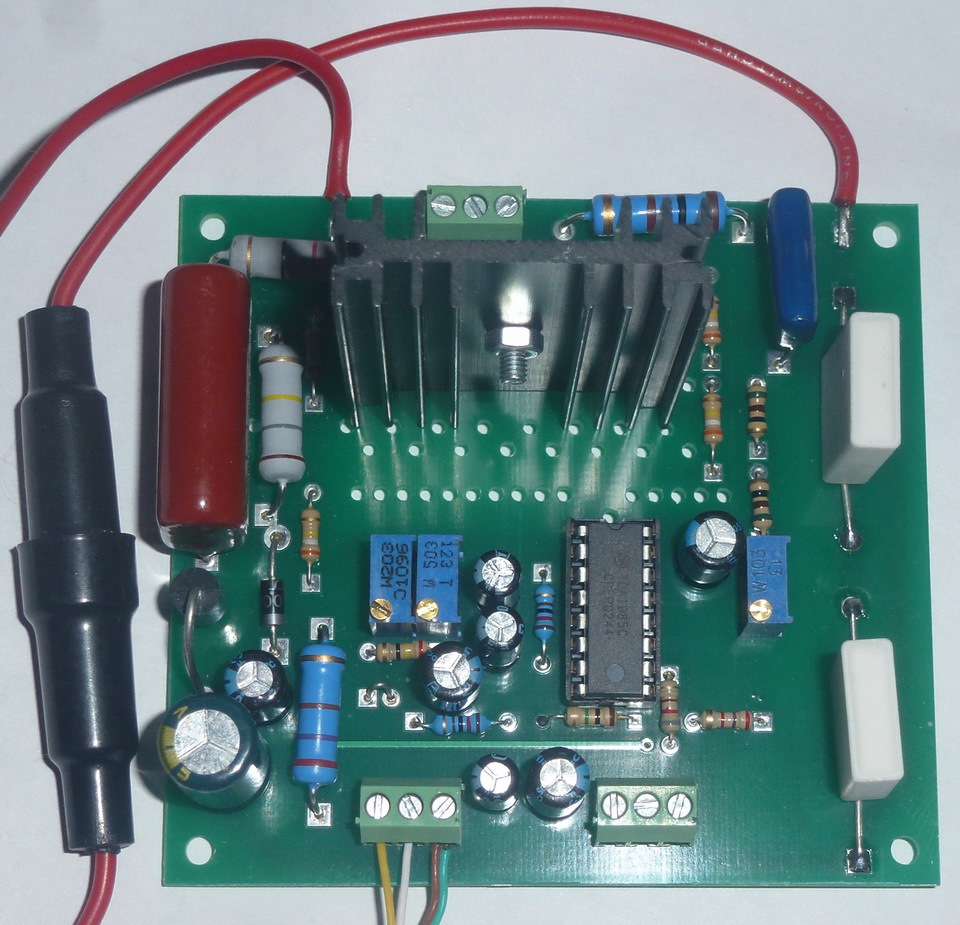 Собранная плата
Собранная плата
Расположение и номиналы деталей на верхней стороне платы.
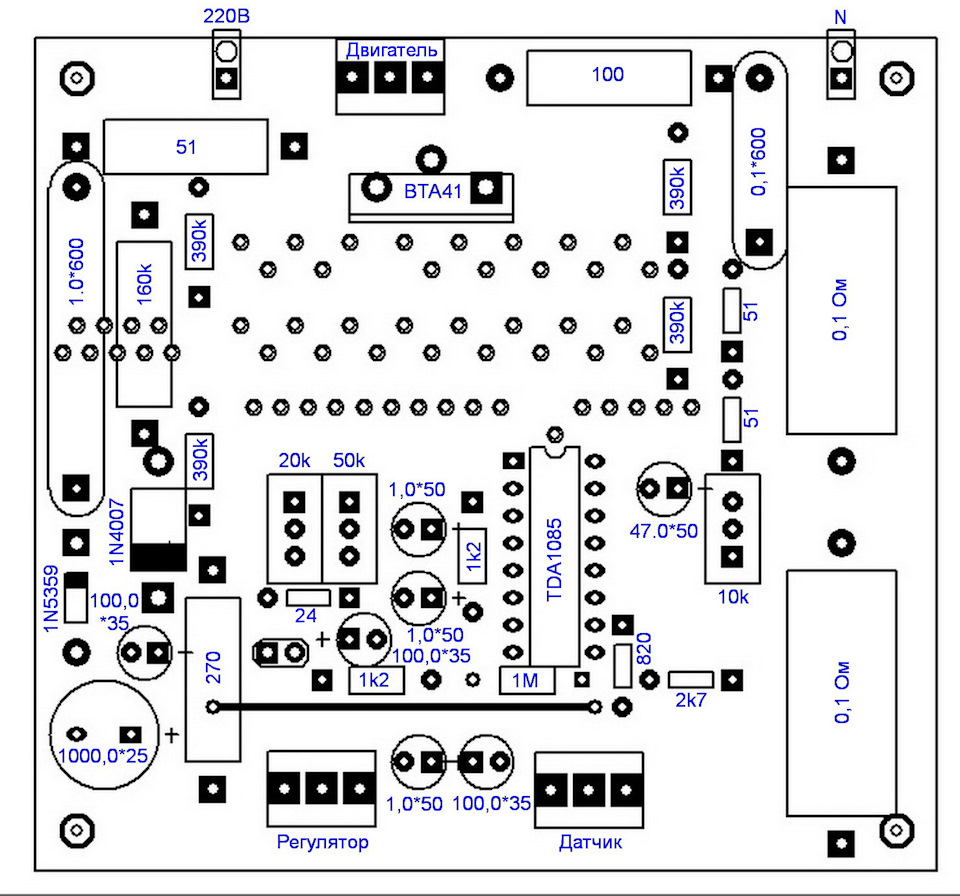 Расположение и номиналы деталей на верхней стороне платы
Расположение и номиналы деталей на верхней стороне платы
Расположение и номиналы деталей на нижней стороне платы.
 Расположение и номиналы деталей на нижней стороне платы
Расположение и номиналы деталей на нижней стороне платы
Tda1085c схема управления двигателем от стиральной
Tda1085c схема управления двигателем от стиральной машины
Попросили меня собрать регулятор оборотов коллекторного двигателя от стиральной машины на микросхеме TDA1085. Регулятор исправно заработал, но при сборке кое что мне не понравилось в плате и схеме. Почитав про эту микросхему я скорректировал электрическую схему и разработал свою печатную плату.
Схема регулятора оборотов получилась вот такая.
Для устройства разработа двухсторонняя печатная плата. Некоторые резисторы и конденсаторы использованы в исполнении для поверхностного монтажа. В отличии от распространенных в интернете схеме и плате, в моей по возможности разнесены высоковольтные и низковольтные цепи, «земля» разведена в соответствии с рекомендациями документов на микросхему. Вот так выглядит готовая плата изготовленная на заводе.
Один из вариантов собранной платы регулятора.
Расположение и номиналы деталей на верхней стороне платы.
Расположение и номиналы деталей на нижней стороне платы.
Страницы
Схемы регуляторов на TDA1085C
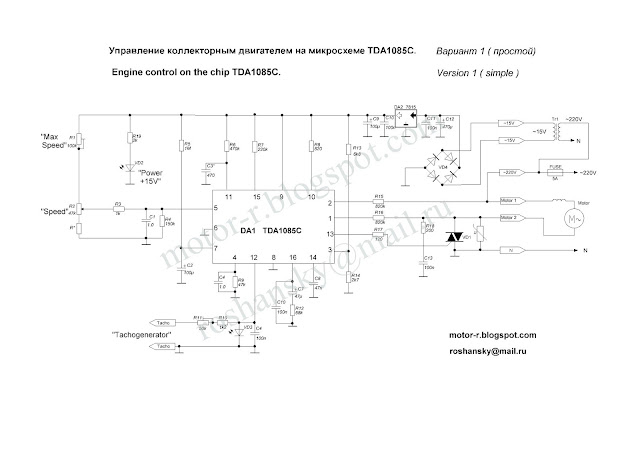
Принципиальная схема 2 вариант ( полный ):

А пока заказаны заводские печатные платы, жду их изготовления — потом продолжу. Многие спрашивают где я заказываю печатные платы. Отвечаю. Печатные платы изготовлены в Китае . Если будет время, в блоге более подробно расскажу как заказывать изготовление плат.
54 комментария:

Добрый вечер.
Когда Вы отредактируете схемы, ошибки номиналов?
На схеме нет ни одного значения напряжения конденсаторов.
Что такое «Accelerate» и «Current Limit»?
Мощность резисторов не подписана.
Эти схемы — не догма , а руководство к действию. Если вы видите ошибки — это уже хорошо.
Не надо искать готовых решений.
Доброе утро.
Благодарю, буду иметь в виду.
Удачи.
Доброго времени суток. Вы можете поделиться файлом печатной платы в личку для полной схемы ?

Здравствуйте автор! Был бы признателен за файлик печатной платы, если скинете в личку. fbi.fox.mulder.x-files@yandex.ru Спасибо.
Здравствуйте, а можно эту микросхему применить для управления двигателем на 30 вольт, в частности таким http://forum.cxem.net/index.php?showtopic=47168. Спасибо
Я думаю что нет. Её разрабатывали специально для двигателей которые работают от 220 вольт. А для 30-вольтового двигателя постоянного тока подойдёт простой ШИМ на какой-нибудь NE555

Спасибо, мне надо с поддержанием мощности на валу даже на малых оборотах.
Если с поддержанием мощности, то можно сделать на контроллере, ведь там есть таходатчик. Например, использовать Ардуино — там 6 выходов ШИМ, обратную связь завести от таходатчика и на аналоговый вход подключить задающий резистор, который будет определять частоту оборотов. Где-то так.
Вопрос как к специалисту-инженеру.А реально запустить мотор на стандартной плате со стиральной машины?Там же тоже стоит регулятор оборотов.Скажем включить мотор на отжим.Там как минимум две скорости.А на моей так вобще многоуровневая регулировка от 400 до 1200 оборотов.Плата REMCO-5037.
Думаю, что можно, но это надо разбираться с конкретной схемой.
Искал схему включения этой микросхемы и наткнулся на этот форум.Она стоит на старой машине Indesit 879W, в отдельной платке управления двигателем bitron mcv 124. Кстати обсуждение этой темы подсказало готовое решение как использовать двигатель от стиралки с возможностью менять на нем обороты (на новых стиралках все программно)
Я могу заказать Вам готовую собранную проверенную плату? Если да, то мой адрес vasytkin@ramb*er.ru
Здравствуйте.Возможно ли заказать готовую плату 2 вариант или печатную плату и схему.
musa-55@mail.ru Спасибо.
Пока нет готовых плат 2 варианта . Есть вариант 1+ http://motor-r.blogspot.com.by/p/blog-page_15.html
Печатных плат чистых не продаю.
Доброго времени суток. Возможно ли у Вас заказать уже готовую плату второй вариант. Есть мотор, заказал плато, а собрать я её сам наверное не соберу так, как не знаю да и не разбираюсь в электронике. Буду очень благодарен Вам за Ваше понимание. Пожалуйста напишите мне на VOLSHEBNIK280162@yandex.ru
Здравствуйте, Александр. Прошу Вас поделиться файлом печатной платы (второй вариант), если Вы не против. Email: tavlad72@mail.ru Заранее благодарен, большое спасибо.
Отвечаю для всех , кто спрашивает про файлы печатных плат.
Можно скачать первые варианты самодельные — их фото на первой странице блога
http://motor-r.blogspot.com.by/
Там нет обозначений и подключение по 5 и 6 ноге надо привести в соответствие со схемами http://motor-r.blogspot.com.by/p/blog-page_4.html Когда я начинал делать — схема была немного другой.
Вот ссылка на скачивание: http://ru.files.fm/u/whngacp
Новая ссылка на скачивание: https://ru.files.fm/u/ghkk8ey9#_
Здравствуйте.Файлами pcb или pcbdoc можете поделиться одной из схем! Буду очень благодарен!
osetia1593@mail.ru

Добрый день!Я бы хотел приобрести регулятор оборотов с поддержанием мощности на микросхемеTDA 1085. напишите стоимость пожалуйста и условия приобретения!С уважением Андрей! stila_@mail.ru
Пожалуйста, по всем вопросам изготовления плат — пишите на почту roshansky@mail.ru
Добрый день. Вы можете поделиться файлом печатной платы в личку для полной схемы ? stefanetaric@mail.ru
Отвечаю для всех , кто спрашивает про файлы печатных плат.
Можно скачать первые варианты самодельные — их фото на первой странице блога
http://motor-r.blogspot.com.by/
Там нет обозначений и подключение по 5 и 6 ноге надо привести в соответствие со схемами http://motor-r.blogspot.com.by/p/blog-page_4.html Когда я начинал делать — схема была немного другой.
Вот ссылка на скачивание: https://ru.files.fm/u/2py5g7ux
Новая ссылка на скачивание: https://ru.files.fm/u/ghkk8ey9#_
Доброго времени суток. Купить возможно?
Пожалуйста, по всем вопросам изготовления плат — пишите на почту roshansky@mail.ru
Здравствуйте. В обвязке микросхемы, использовать смд резисторы можно?
Конечно можно. Только чтобы соответствовали мощности
Здравствуйте! Спасибо за возможность сделать самому!
I. А подскажите пожалуйста, можно ли подобное повторить на Arduino.
Т.е.:
1. Источник питания для Ардуино;
2. Arduino;
3. Схема для детекции нуля(как-то там с галванической развязкой);
4. Сам BTA, которым Арудино и будет управлять.
Ну и таходатчик завести на Ардуино.
Да, конечно можно, вы правильно рассуждаете.
Спасибо за положительную обратную связь)
Только с таходатчиком пока не совсем разобрался
Я тестером смотрел уровень напряжения на 12 входе микросхемы TDA. Там, вроде как, были постоянные сколько-то Вольт в зависимости от оборотов.
Т.е. сам таходатчик генерирует, вроде как, переменное напряжение. А на 12 входе получаем постоянное.
Плюс, получается какой-то фильтр нижних частот, если смотреть R-C цепь (с диодом пока не разобрался).
Не могли бы пояснить данный кусок? Я, наверное, себя уже порядком запутал)
Хороший вопрос. Подробнее можно почитать в pdf-файле на TDA1085 — у меня в блоге есть — там несколько абзацев этому посвящены, только перевести надо с английского.
А вообще у TDA1085 есть два входа для обратной связи по скорости —
1. пин 4 — это аналоговый вход
2. пин 12 — это цифровой вход, который чаще всего используется.
Мы используем цифровой вход, для него важна не амплитуда , а частота приходящих импульсов от таходатчика ( возможно это упрощённое объяснение) В схеме от разработчиков диода по 12 входу нет, но с ним работает лучше — возможно просто лучше формирует входной сигнал.
И тут у меня созрел следующий вопрос —
А как тогда той же Arduino эти сигналы воспринимать?
Возможно это ответ? — http://arduino.ru/forum/programmirovanie/kak-izmerit-chastotu
Если да, то надо, наверное, каким-то образом сделать, чтобы максимальная амплитуда сигнала была 5В, чтобы у Atmega’e ничего не выгорело внутри?
Ардуино будет измерять частоту без проблем, а подать сигнал таходатчика можно разными методами — например использовать оптрон PC817, тогда и развязка гальваническая будет. Естественно надо исходить из того — что сигнал таходатчика — это синусоида , у которой изменяется и амплитуда и частота. Амплитуда изменяется от 0 вольт до 40 вольт примерно.
Прекрасный для самоделок мотор от стиральной машины имеет слишком высокие обороты, и малый ресурс на максимальных оборотах. Поэтому я применяю простой самодельный регулятор оборотов (без потери мощности). Схема опробована и показала прекрасный результат. Обороты регулируются примерно от 600 до max. 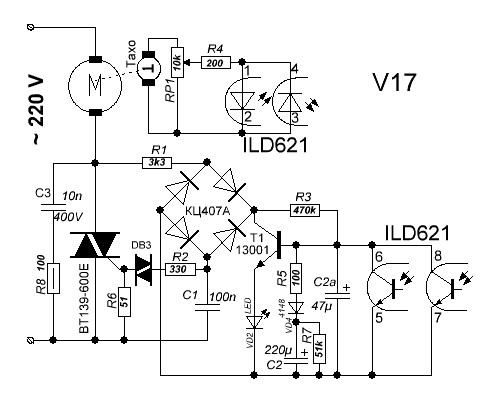
Потенциометр электрически изолирован от сети, что повышает безопасность пользования регулятором.
Симистор необходимо поставить на радиатор.
Оптопара (2 шт) практически любая, но EL814 имеет внутри 2 встречных светодиода, и просится в эту схему.
Высоковольтный транзистор можно поставить, например, IRF740 (от БП компьютера), но жалко такой мощный транзистор ставить в слаботочную цепь. Хорошо работают транзисторы 1N60, 13003, КТ940.
Вместо моста КЦ407 вполне подойдет мост из 1N4007, или любой на >300V, и ток >100mA.
Печатка в формате .lay5. Печатка нарисована «Вид со стороны М2 (пайка)», так что при выводе на принтер ее надо зеркалить. Цвет М2 = черный, фон = белый, остальные цвета не печатать. Контур платы (для обрезки) выполнен на стороне М2, и будет указателем границ платы после травления. Перед запайкой деталей его следует удалить. В печатку добавлен рисунок деталей со стороны монтажа для переноса на печатку. Она тогда приобретает красивый и законченный вид.
Регулировка от 600 оборотов подходит для большинства самоделок, но для особых случаев предлагается схема с германиевым транзистором. Минимальные обороты удалось снизить до 200.
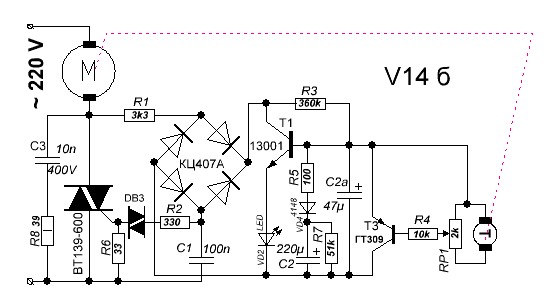
Минимальные обороты получил 200 об/мин (170-210, электронный тахометр на низких оборотах плохо меряет), транзистор Т3 поставил ГТ309, он прямой проводимости,и их много. Если поставить МП39, 40, 41, П13, 14, 15, то обороты должны еще снизиться, но уже не вижу надобности. Главное, что таких транзисторов как грязи, в отличие от МП37 (смотри форум).
Плавный пуск прекрасно работает, Правда на валу мотора пусто, но от нагрузки на валу при пуске, подберу R5 при необходимости.
R5 = 0-3к3 в зависимости от нагрузки;; R6 = 18 Ом — 51 Ом — в зависимости от симистора, у меня сейчас этого резистора нет;; R4 = 3к — 10к — защита Т3;; RР1 = 2к-10к — регулятор скорости, связан с сетью, защита от сетевого напряжения оператора обязательна. Есть потенциометры с пластмассовой осью, желательно использовать. Это большой недостаток данной схемы, и если нет большой необходимости в малых оборотах, советую использовать V17 (от 600 об/мин).
С2 = плавный пуск, = время задержки включения мотора;; R5 = заряд С2, = наклон кривой заряда, = время разгона мотора;; R7 — время разряда С2 для следующего цикла плавного пуска (при 51к это примерно 2-3 сек)
DataSheet
Техническая документация к электронным компонентам на русском языке.
TDA1085 — Регулятор оборотов коллекторного двигателя
Микросхема TDA1085 фирмы MOTOROLA (отечественный аналог — КС1027ХА4) представляет собой контроллер коллекторного электродвигателя (ЭД) переменного тока. Она включает в себя все необходимые управляющие узлы и элементы, обеспечивающие функционирование ЭД в различных режимах его работы (например, в режимах разгона и стабилизации выбранной скорости вращения).
Особенности
- Внутренний преобразователь частоты в напряжение
- Встроенный генератор разгона
- Плавный пуск
- Ограничение тока нагрузки
- Отслеживание целостности цепи таходатчика
- Прямое питание от источника переменного тока
- Функция безопасного подключения двигателя
Готовый регулятор оборотов или все для его сборки вы можете заказать в нашем интернет-магазине
Диапазон скоростей вращения двигателя:
Общее описание
Микросхема TDA 1085C управляет симистором в соответствии с задаваемой скоростью. Скорость вращения двигателя отслеживается тахогенератором в цифровом формате (считаются импульсы от тахогенератора), а затем преобразуется в аналоговое напряжение. Скорость устанавливается, внешне фиксированной, и подается на вход внутреннего линейного регулятора после того, как будут заданы программируемые линейные ускорения. Общий результат состоит в поддержании полного диапазона скоростей с двумя линейными ускорениями, которые позволяют эффективно управлять стиральной машиной. Кроме того, TDA 1085C защищает всю систему от переменного тока питающей сети, при остановке или колебаниях, и от перегрузки по току в двигателе или при неисправности таходатчика.
Функции входов и выходов ( для рисунков 1 и 8)
Регулятор напряжения (стабилизатор) – (Контакты 9 и 10). Это регулятор параллельного типа способный поглощать большие токи и давать хорошие характеристики. Питание подается от сети переменного тока через внешние гасящие резисторы R1, R2, (резисторы 6.8 кОм и 270 Ом) и выпрямитель. Полуволна тока после диода 1N4007 подается на сглаживающий фильтр, состоящий из двух конденсаторов, емкостью 100 мкФ и резистора 270 Ом, напряжение на котором контролируется микросхемой. Когда питание (Vcc) превысит 15 В, ток проходит по другому гасящему резистору R10 на вывод 10. Эти три резисторы должны быть подобраны таким образом, чтобы удовлетворять следующим условиям:
- Выдавать ток 10 мА через вывод 10, когда напряжение питания переменного тока минимально и потребление напряжения постоянного тока (Vcc) максимально (при быстром разгоне двигателя и присутствии импульсов)
- Поддерживать напряжение 3 В на выводе 10, когда в линия питания переменного тока выдает максимальный ток, а потребление напряжения постоянного тока минимальное (нет разгона и пульсаций).
- Задержку пускового импульса, пока ток проходит через ноль, при широких границах пуска и индуктивных нагрузках.
Отказ по питанию в цепи переменного тока приведет к отключению. Двойной емкостный фильтр, состоящий из резисторов R1 и R2, хорошо сглаживает пульсации и устраняет шумы при разгоне двигателя.
Контроль частоты вращения (выводы 4, 11, 12). Микросхема может работать с внешним аналоговым датчиком скорости вращения: его выход должен быть подключен выводу 4, а выводы 12 и 8 должны быть соединены между собой.
В большинстве случаев более удобно использовать цифровой датчик скорости вращения двигателя с одним недорогим тахогенератором, который не нуждается в настройке. За каждый положительный цикл на выводе 12, конденсатор, подключенный к выводу 11, заряжается почти до напряжения Vcc . В это же время, на вывод 4 подается ток в 10 раз превышающий, зарядный ток конденсатора C11. Ток источника называется G и жестко задан, но тем не менее, требует регулировки подстроечным сопротивлением 50 кОм, подключенном к выводу 4. Ток через этот резистор пропорционален емкости на выводе 11 и скорости вращения двигателя; напряжение на выводе 4 фильтруется от помех с помощью конденсатора и представляет “истинную фактическую скорость вращения двигателя”.
Чтобы сохранить линейность на высоких оборотах, важно убедиться, что емкость, подключенная к выводу 11 полностью заряжается: внутреннее сопротивление источника, подключенного к выводу 11, имеет импеданс 100 кОм. Тем не менее емкость на выводе 11, должна быть максимально высокой, так как она имеет большое влияние на температурный коэффициент. Резистор 470 кОм между выводами 11 и 9 уменьшает ток утечки и влияние температурного коэффициента.
Через вывод 12 осуществляется функция контроля: когда напряжение на нем превышает 5 В, запускающие импульсы тормозятся и микросхема сбрасывается. Так же через него отслеживается целостность цепи тахогенератора, и в случае ее нарушения, запускающие импульсы тормозятся, что защищает двигатель от ухода из-под контроля. Внутри TDA1085C к выводу 12 подключен демпферный диод, что дает возможность сделать схему более компактной.
Генератор пусковых импульсов — (Выводы 1, 2, 5, 13, 14, 15)
Эта цепь выполняет четыре функции:
- Преобразование уровня выходного сигнала с усилителя постоянного тока в пропорциональный угол регулирования.
- Калибровку длительности импульса.
- Повторение импульса, если симистор не переключился или нет тока через щетки двигателя (обрыв цепи питания).
- Задержку запускающих импульсов, пока ток не пройдет через ноль при широком угле регулирования и индуктивных нагрузках.
Сопротивление на выводе 15 задает разрядный ток конденсатора на выводе 14. Пилообразный сигнал определяется R15 и С14(обычно 47 нФ). Длительность управляющего импульса и период повторения находятся в обратно пропорциональной зависимости от крутизны наклона пилообразного напряжения.
Генератор пилообразного напряжения – (выводы 5, 6, 7). Истинные значения скорости устанавливаются в соответствии со значениями на выходе генератора пилообразного сигнала (вывод 7). В соответствии с заданным значением скорости ( напряжение на выводе 5), генератор пилообразного напряжения заряжает внешний конденсатор C7 до момента, когда напряжение на выводе 5 (заданная скорость) сравняется с напряжением на выводе 4 (действительная скорость), смотрите рисунок 2. Микросхема имеет внутренний источник зарядного тока в 1.2 мА, который выдает от 0 до 12 В на выводе 7. Он дает быстрый разгон двигателя (обычно за 5.0 с), что позволяет быстро изменять скорость без чрезмерной нагрузки на механические части привода. В TDA 1085C есть возможность снизить этот высокое ускорение с введением низкого разгона. Это достигается путем уменьшения тока через вывод 7 до 5.0 мА, оставаясь под полным управлением напряжением на выводе 6. Это возможно при соблюдении следующих условий:
- Наличие быстрого разгона VPin 5 > VPin 4
- Происходит разделение в диапазоне напряжений на выводе 4 (действительная скорость двигателя) определяется VPin 6 ≤ VPin 4 ≤ 2.0 VPin 6
Для двух фиксированных значений VPin 5 и VPin 6, скорость мотора будет иметь большой разгон. Если сброс произойдет (независимо от причин), указанных выше последующий разгон будет полностью перерабатываться от 0 до максимальной скорости. Если напряжение на выводе 6 равно 0, возникает только высокий темп разгона.
Чтобы установить действительную нулевую скорость надо ,чтобы напряжение на выводе 5 (от 0 до 80 мВ) интерпретировалось как истинный ноль. Как следствие, при изменении устанавливаемой скорости, проектировщик должен быть уверен, что любой переходный процесс не будет проходить через ноль (напряжение на выводе 5 не будет ниже 80 мВ) иначе вся схема будет перезапущена.
Как и напряжения, подаваемые на контакты 5 и 6, являются производными от внутреннего стабилизатора напряжения, так и напряжение на выводе 4 тоже происходит от того же источника питания, скорость мотора (которая определяется соотношением между вышеуказанными напряжениями) является полностью независимой от колебаний напряжения питания Vcc и температурного фактора.
Усилитель управления – (пин 16) он усиливает разницу между истинным значением скорость (вывод 4) и заданной скорости (контакт 5), посредством генератора пилообразного сигнала (генератора разгона). Его сигнал на выходе (вывод 16) имеет двойную чувствительность с максимальным возможностям ± 100 мА и заданной крутизной (340 мА/В это типовое значение). Вывод 16 напрямую управляет генератором пусковых импульсов, и должен быть нагружен на электрическую сеть, которая компенсирует механические характеристики двигателя и его нагрузку, для того, чтобы обеспечить стабильность в любом состоянии и кратчайшую переходную характеристику см. Рис.4.
Эта сеть должна быть подобрана экспериментально.
В случае периодического изменения крутящего момента, вывод 16 непосредственно обеспечивает угол сдвига фаз колебаний.
Вывод 13 является импульсным выходом, и внешний ограничивающий резистор на нем обязателен.
Ограничитель тока – (вывод 3). Безопасная работа двигателя и симистора при все условиях обеспечивается за счет ограничения пикового тока. Ток двигателя дает переменное напряжение на шунтирующем резисторе (0,05 Вт рис. 4). Отрицательные полуволны передаются на вывод 3, который имеет положительный потенциал, определяемый резисторами R3 и R4. Когда возрастает ток двигателя, динамический диапазон напряжения на выводе 3 тоже увеличивается. Когда вывод 3 становится немного отрицательным относительно вывода 8 , ток начинает проходить по нему. Этот ток, как правило, усиливают в 180 раз, затем используется для разрядки конденсатора на выводе 7 . Как следствие, уменьшается угол регулирования до значения, где будет достигнуто равновесие. Выбор резисторов R3, R4 и шунта определяет величина тока разряда конденсатора на выводе 7.
Обратите внимание, что ограничитель тока действует только на пике тока симистора.
 Разводка печатной платы
Разводка печатной платы 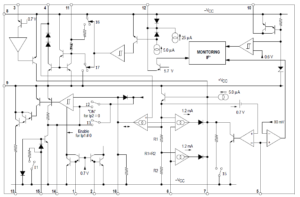 Внутренняя схема
Внутренняя схема
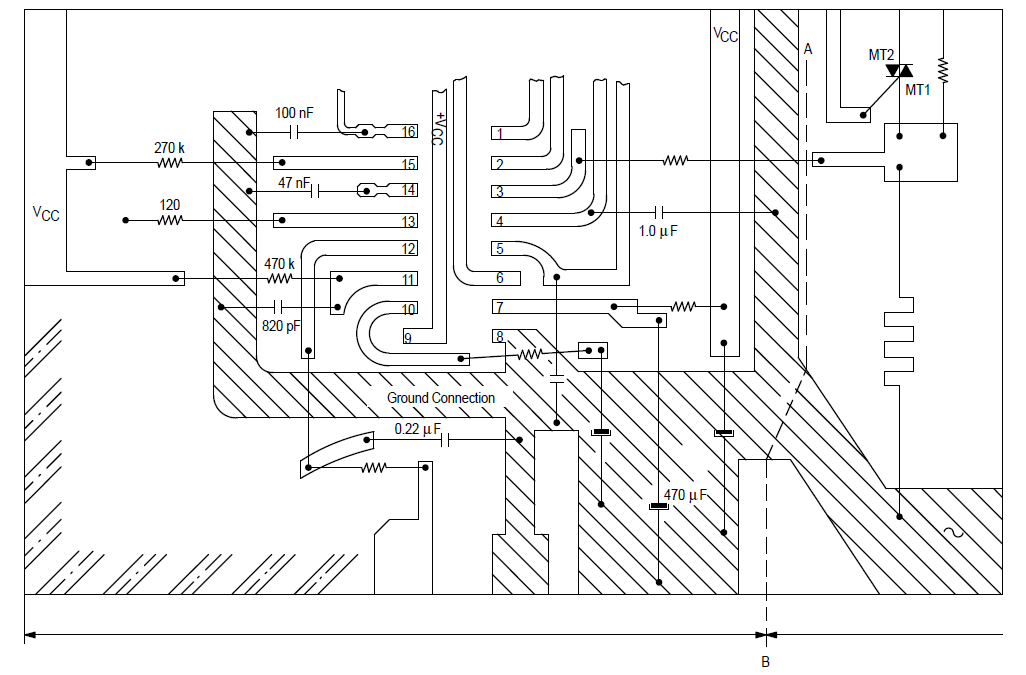
Правила компоновки печатной платы.
В большинстве схем, где используется TDA1085C, на одной печатной плате рядом с большими токами и напряжениями могут присутствовать сигналы низкого напряжения значением в несколько милливольт.
Самое главное разделить их друг от друга, для этого следует соблюдать следующие правила:
- Выводы развязывающего конденсатора, которые также являются входами одинаковых компараторов, должны располагаться, как можно ближе к микросхеме и друг к другу, и заземлены в одной точке.
- Заземление от тахогенератора должно быть подключено непосредственно к контакту 8, при этом должен заземляться только тахогенератор. По сути, последнее является основной причиной возникновения шума из-за своей близости к двигателю, который индуцирует высокие значение dφ/dt.
- Схема заземления должна быть типа «звезда», чтобы полностью устранить силовые токи, протекающие в цепи заземления, передающиеся через развязывающие конденсаторы на чувствительные выводы: 4, 5, 7, 11, 12, 14, 16.
В качестве примера на рисунке 5 представлена плата, на которой показано подключение группы чувствительных к помехам выводов и связанных с ними конденсаторов в соответствии с вышеперечисленными правилами. Обратите внимание на полное разделение низковольтной сигнальной части и мощной высоковольтной части. Их раздел идет вдоль линии AB.
Соблюдение этих правил дает возможность регулировки во всем диапазоне скоростей.
Источник питания
Поскольку рассеивающий резистор рассеивает заметную мощность, необходимо по возможности снизить потребление тока до минимума. При изношенном щеточном узле схема может подавать запускающие импульсы несколько раз, что вызывает увеличение потребляемого тока. При выборе гасящего резистора нужно это учитывать. Кроме того параллельный стабилизатор должен всегда находиться в следующем динамическом диапазоне: ток через вывод 10 должен быть выше 1 мА, а напряжение выше 3 В при самой плохой конфигурации. Двойной фильтр на выходе обязателен.
Цепь тахогенератора
Напряжение сигнала от тахогенератора должно быть пропорционально скорости вращения двигателя. Для устойчивой работы к выходу тахогенератора необходимо подключить RC-фильтр. Выполнение этих факторов, дает сигнал постоянной амплитуды на выводе 12 на всем диапазоне скоростей вращения двигателя. Рекомендуется проверить, чтобы эта максимальная амплитуда находилась в пределах 1,0 В, чтобы иметь самое большое отношение сигнал/шум без перезапуска микросхемы (что может произойти, если напряжение на выводе 12 достигнет 5,5 В). Необходимо также проверить, чтобы сигнал на выводе 12 находился в балансе между «высоким значением» (более 300 мВ) и «низким». 8-полюсный тахогенератор — это минимум для стабильности на низких оборотах, а 16-полюсник еще лучше.
RC фильтр в цепи тахогенератора должен быть настроен на 30 Гц, чтобы быть как можно дальше от 150 Гц, что соответствует третьей гармонике сети переменного тока, генерируемой двигателем во время запуска. Кроме того, подключенный к выводу 12, высокоомный резистор, дает положительное смещение на этом выводе, устраняя шум, который может интерпретироваться как сигнал от тахогенератора. Это смещение должно быть спроектировано таким образом, чтобы на выводе 12 было не менее 200 мВ (отрицательное напряжение) при самой низкой скорости вращения двигателя.
Преобразователь частоты в напряжение
Емкость на выводе 11 имеет рекомендованное значение 820 пФ для 8-полюсных тахогенераторов с максимальной скоростью вращения двигателя 15000 об/мин, а сопротивление на выводе 11 всегда должно быть 470 кОм.
Сопротивление подключенное к выводу 4 должно выбираться так, чтобы давать 12 В при максимальной скорости вращения двигателя, чтобы максимизировать отношение сигнал / шум. Поскольку отношение FV / C, а также значение CPin 11 разделены, RPin 4 должно быть регулируемым. Оно должно состоять из постоянного резистора и подстроечного, составляющего 25% от их общего сопротивления. Регулировка при этом станет проще.
После регулировки, например, при максимальной скорости вращения двигателя, FV / C имеет остаточную нелинейность; коэффициент преобразования (мВ на один об / мин) увеличивается на 7,7% по мере того, как скорость приближается к нулю. Гарантированный разброс последнего очень узкий, максимальная ошибка при этом составит 1% от скорости вращения.
Следующие формулы определяют напряжение на выводе 4 (VPin 4) в вольтах:
120 k = Rint, (входное сопротивление на выводе 11)
Установка скорости вращения — (контакт 5) При проектировании подбирают цепь внешних резисторов, которые задают серию различных напряжений, соответствующих различным скоростям вращения двигателя. При переключении внешних резисторов необходимо убедиться убедитесь, что на контакт 5 не подается напряжение ниже 80 мВ. Если такое случиться, произойдет полная перезагрузка схемы.
Генератор разгона — (Pin 6) Если требуется только высокий темп разгона, соедините вывод 6 с землей.
При задании разгона, устанавливается напряжение на выводе 6, соответствующее точке разгона двигателя. Задание (или медленный разгон) будет продолжаться до момента, когда скорость двигателя достигнет удвоенного начального значения.
Соотношение двух напряжений может быть изменено вниз (рисунок 6) или вверх (рисунок 7).
Задаваемый разгон может быть уменьшен внешним резистором от VCC, заряжающим емкость на выводе7, добавляя его ток к току внутреннего генератор 5.0 мА.
Силовые цепи
Переключающий импульс симистора должен определяться резистором на выводе 13 в соответствии с потребностями в квадранте IV.Длительность запускающего импульса может быть нарушена шумовыми сигналами, генерируемыми самим симистором, которые интерферируют в пределах контактов 14 и 16, именно те, которые его определяют. Легко заметный, этот эффект безвреден.
Симистор должен быть защищен от скачков напряжения во внешней цепи питания цепочкой 100 нФ х 100 Ом.
Шунтирующий резистор должен быть как можно более неиндуктивным. Его можно изготовить, используя константановую проволоку.
Когда нагрузка представляет собой универсальный двигатель постоянного тока, подключенный через выпрямительный мост, симистор должен быть защищен от скачков напряжений при коммутации, катушкой 1,0-2,0 мГн, подключенной последовательно с выводом симистора MT2.
Функции синхронизации выполняются резисторами, определяющими напряжение в линии переменного тока и проводимость симистора. Значение 820 кОм является нормальным, но может быть уменьшено до 330 кОм для того, чтобы обнаруживать «нули» и уменьшить остаточную составляющую в линии постоянного тока ниже 20 мА.
Ограничение тока
Ограничитель тока начинает разряжать конденсатор 7 (опорная скорость), когда ток двигателя достигает заданного порогового уровня. Коэффициент усиления контура определяется резистором, соединяющим вывод 3 с последовательным шунтом. Опыт показал, что оптимальное значение для ограничения среднеквадратичного тока 10 A находится в пределах 2,0 кВт. Вывод 3 имеет чувствительность по току, которая ограничена разумными значениями и не должна реагировать на пиковые значения.
Если не используется, контакт 3 должен быть подключен к максимальному положительному напряжению 5,0 В вместо того, чтобы оставаться свободным.
Стабильность контура
Цепочка на выводе 16 является преобладающей и должна быть скорректирована экспериментально во время разработки модуля. Значения, указанные на рисунке 4, типичны для стиральных машин, но допускают большие изменения от одной модели к другой. R16 (единственное ограничение) не должен опускаться ниже 33 кОм, в противном случае ограничение скорости нарастания вызовет большие переходные ошибки при нагрузках.
Если вы нашли ошибку, пожалуйста, выделите фрагмент текста и нажмите Ctrl+Enter.
DataSheet
Техническая документация к электронным компонентам на русском языке.
TDA1085 — Регулятор оборотов коллекторного двигателя
Микросхема TDA1085 фирмы MOTOROLA (отечественный аналог — КС1027ХА4) представляет собой контроллер коллекторного электродвигателя (ЭД) переменного тока. Она включает в себя все необходимые управляющие узлы и элементы, обеспечивающие функционирование ЭД в различных режимах его работы (например, в режимах разгона и стабилизации выбранной скорости вращения).
Особенности
- Внутренний преобразователь частоты в напряжение
- Встроенный генератор разгона
- Плавный пуск
- Ограничение тока нагрузки
- Отслеживание целостности цепи таходатчика
- Прямое питание от источника переменного тока
- Функция безопасного подключения двигателя
Готовый регулятор оборотов или все для его сборки вы можете заказать в нашем интернет-магазине
Диапазон скоростей вращения двигателя:
от 0 до 15000 об/мин
Общее описание
Микросхема TDA 1085C управляет симистором в соответствии с задаваемой скоростью. Скорость вращения двигателя отслеживается тахогенератором в цифровом формате (считаются импульсы от тахогенератора), а затем преобразуется в аналоговое напряжение. Скорость устанавливается, внешне фиксированной, и подается на вход внутреннего линейного регулятора после того, как будут заданы программируемые линейные ускорения. Общий результат состоит в поддержании полного диапазона скоростей с двумя линейными ускорениями, которые позволяют эффективно управлять стиральной машиной. Кроме того, TDA 1085C защищает всю систему от переменного тока питающей сети, при остановке или колебаниях, и от перегрузки по току в двигателе или при неисправности таходатчика.
Функции входов и выходов ( для рисунков 1 и 8)
Регулятор напряжения (стабилизатор) – (Контакты 9 и 10). Это регулятор параллельного типа способный поглощать большие токи и давать хорошие характеристики. Питание подается от сети переменного тока через внешние гасящие резисторы R1, R2, (резисторы 6.8 кОм и 270 Ом) и выпрямитель. Полуволна тока после диода 1N4007 подается на сглаживающий фильтр, состоящий из двух конденсаторов, емкостью 100 мкФ и резистора 270 Ом, напряжение на котором контролируется микросхемой. Когда питание (Vcc) превысит 15 В, ток проходит по другому гасящему резистору R10 на вывод 10. Эти три резисторы должны быть подобраны таким образом, чтобы удовлетворять следующим условиям:
- Выдавать ток 10 мА через вывод 10, когда напряжение питания переменного тока минимально и потребление напряжения постоянного тока (Vcc) максимально (при быстром разгоне двигателя и присутствии импульсов)
- Поддерживать напряжение 3 В на выводе 10, когда в линия питания переменного тока выдает максимальный ток, а потребление напряжения постоянного тока минимальное (нет разгона и пульсаций).
- Задержку пускового импульса, пока ток проходит через ноль, при широких границах пуска и индуктивных нагрузках.
Отказ по питанию в цепи переменного тока приведет к отключению. Двойной емкостный фильтр, состоящий из резисторов R1 и R2, хорошо сглаживает пульсации и устраняет шумы при разгоне двигателя.
Контроль частоты вращения (выводы 4, 11, 12). Микросхема может работать с внешним аналоговым датчиком скорости вращения: его выход должен быть подключен выводу 4, а выводы 12 и 8 должны быть соединены между собой.
В большинстве случаев более удобно использовать цифровой датчик скорости вращения двигателя с одним недорогим тахогенератором, который не нуждается в настройке. За каждый положительный цикл на выводе 12, конденсатор, подключенный к выводу 11, заряжается почти до напряжения Vcc . В это же время, на вывод 4 подается ток в 10 раз превышающий, зарядный ток конденсатора C11. Ток источника называется G и жестко задан, но тем не менее, требует регулировки подстроечным сопротивлением 50 кОм, подключенном к выводу 4. Ток через этот резистор пропорционален емкости на выводе 11 и скорости вращения двигателя; напряжение на выводе 4 фильтруется от помех с помощью конденсатора и представляет “истинную фактическую скорость вращения двигателя”.
Чтобы сохранить линейность на высоких оборотах, важно убедиться, что емкость, подключенная к выводу 11 полностью заряжается: внутреннее сопротивление источника, подключенного к выводу 11, имеет импеданс 100 кОм. Тем не менее емкость на выводе 11, должна быть максимально высокой, так как она имеет большое влияние на температурный коэффициент. Резистор 470 кОм между выводами 11 и 9 уменьшает ток утечки и влияние температурного коэффициента.
Через вывод 12 осуществляется функция контроля: когда напряжение на нем превышает 5 В, запускающие импульсы тормозятся и микросхема сбрасывается. Так же через него отслеживается целостность цепи тахогенератора, и в случае ее нарушения, запускающие импульсы тормозятся, что защищает двигатель от ухода из-под контроля. Внутри TDA1085C к выводу 12 подключен демпферный диод, что дает возможность сделать схему более компактной.
Генератор пусковых импульсов — (Выводы 1, 2, 5, 13, 14, 15)
Эта цепь выполняет четыре функции:
- Преобразование уровня выходного сигнала с усилителя постоянного тока в пропорциональный угол регулирования.
- Калибровку длительности импульса.
- Повторение импульса, если симистор не переключился или нет тока через щетки двигателя (обрыв цепи питания).
- Задержку запускающих импульсов, пока ток не пройдет через ноль при широком угле регулирования и индуктивных нагрузках.
Сопротивление на выводе 15 задает разрядный ток конденсатора на выводе 14. Пилообразный сигнал определяется R15 и С14(обычно 47 нФ). Длительность управляющего импульса и период повторения находятся в обратно пропорциональной зависимости от крутизны наклона пилообразного напряжения.
Генератор пилообразного напряжения – (выводы 5, 6, 7). Истинные значения скорости устанавливаются в соответствии со значениями на выходе генератора пилообразного сигнала (вывод 7). В соответствии с заданным значением скорости ( напряжение на выводе 5), генератор пилообразного напряжения заряжает внешний конденсатор C7 до момента, когда напряжение на выводе 5 (заданная скорость) сравняется с напряжением на выводе 4 (действительная скорость), смотрите рисунок 2. Микросхема имеет внутренний источник зарядного тока в 1.2 мА, который выдает от 0 до 12 В на выводе 7. Он дает быстрый разгон двигателя (обычно за 5.0 с), что позволяет быстро изменять скорость без чрезмерной нагрузки на механические части привода. В TDA 1085C есть возможность снизить этот высокое ускорение с введением низкого разгона. Это достигается путем уменьшения тока через вывод 7 до 5.0 мА, оставаясь под полным управлением напряжением на выводе 6. Это возможно при соблюдении следующих условий:
- Наличие быстрого разгона VPin 5 > VPin 4
- Происходит разделение в диапазоне напряжений на выводе 4 (действительная скорость двигателя) определяется VPin 6 ≤ VPin 4 ≤ 2.0 VPin 6
Для двух фиксированных значений VPin 5 и VPin 6, скорость мотора будет иметь большой разгон. Если сброс произойдет (независимо от причин), указанных выше последующий разгон будет полностью перерабатываться от 0 до максимальной скорости. Если напряжение на выводе 6 равно 0, возникает только высокий темп разгона.
Чтобы установить действительную нулевую скорость надо ,чтобы напряжение на выводе 5 (от 0 до 80 мВ) интерпретировалось как истинный ноль. Как следствие, при изменении устанавливаемой скорости, проектировщик должен быть уверен, что любой переходный процесс не будет проходить через ноль (напряжение на выводе 5 не будет ниже 80 мВ) иначе вся схема будет перезапущена.
Как и напряжения, подаваемые на контакты 5 и 6, являются производными от внутреннего стабилизатора напряжения, так и напряжение на выводе 4 тоже происходит от того же источника питания, скорость мотора (которая определяется соотношением между вышеуказанными напряжениями) является полностью независимой от колебаний напряжения питания Vcc и температурного фактора.
Усилитель управления – (пин 16) он усиливает разницу между истинным значением скорость (вывод 4) и заданной скорости (контакт 5), посредством генератора пилообразного сигнала (генератора разгона). Его сигнал на выходе (вывод 16) имеет двойную чувствительность с максимальным возможностям ± 100 мА и заданной крутизной (340 мА/В это типовое значение). Вывод 16 напрямую управляет генератором пусковых импульсов, и должен быть нагружен на электрическую сеть, которая компенсирует механические характеристики двигателя и его нагрузку, для того, чтобы обеспечить стабильность в любом состоянии и кратчайшую переходную характеристику см. Рис.4.
Эта сеть должна быть подобрана экспериментально.
В случае периодического изменения крутящего момента, вывод 16 непосредственно обеспечивает угол сдвига фаз колебаний.
Вывод 13 является импульсным выходом, и внешний ограничивающий резистор на нем обязателен.
Ограничитель тока – (вывод 3). Безопасная работа двигателя и симистора при все условиях обеспечивается за счет ограничения пикового тока. Ток двигателя дает переменное напряжение на шунтирующем резисторе (0,05 Вт рис. 4). Отрицательные полуволны передаются на вывод 3, который имеет положительный потенциал, определяемый резисторами R3 и R4. Когда возрастает ток двигателя, динамический диапазон напряжения на выводе 3 тоже увеличивается. Когда вывод 3 становится немного отрицательным относительно вывода 8 , ток начинает проходить по нему. Этот ток, как правило, усиливают в 180 раз, затем используется для разрядки конденсатора на выводе 7 . Как следствие, уменьшается угол регулирования до значения, где будет достигнуто равновесие. Выбор резисторов R3, R4 и шунта определяет величина тока разряда конденсатора на выводе 7.
Обратите внимание, что ограничитель тока действует только на пике тока симистора.
Разводка печатной платы Внутренняя схема
Применение
Правила компоновки печатной платы.
В большинстве схем, где используется TDA1085C, на одной печатной плате рядом с большими токами и напряжениями могут присутствовать сигналы низкого напряжения значением в несколько милливольт.
Самое главное разделить их друг от друга, для этого следует соблюдать следующие правила:
- Выводы развязывающего конденсатора, которые также являются входами одинаковых компараторов, должны располагаться, как можно ближе к микросхеме и друг к другу, и заземлены в одной точке.
- Заземление от тахогенератора должно быть подключено непосредственно к контакту 8, при этом должен заземляться только тахогенератор. По сути, последнее является основной причиной возникновения шума из-за своей близости к двигателю, который индуцирует высокие значение dφ/dt.
- Схема заземления должна быть типа «звезда», чтобы полностью устранить силовые токи, протекающие в цепи заземления, передающиеся через развязывающие конденсаторы на чувствительные выводы: 4, 5, 7, 11, 12, 14, 16.
В качестве примера на рисунке 5 представлена плата, на которой показано подключение группы чувствительных к помехам выводов и связанных с ними конденсаторов в соответствии с вышеперечисленными правилами. Обратите внимание на полное разделение низковольтной сигнальной части и мощной высоковольтной части. Их раздел идет вдоль линии AB.
Соблюдение этих правил дает возможность регулировки во всем диапазоне скоростей.
Источник питания
Поскольку рассеивающий резистор рассеивает заметную мощность, необходимо по возможности снизить потребление тока до минимума. При изношенном щеточном узле схема может подавать запускающие импульсы несколько раз, что вызывает увеличение потребляемого тока. При выборе гасящего резистора нужно это учитывать. Кроме того параллельный стабилизатор должен всегда находиться в следующем динамическом диапазоне: ток через вывод 10 должен быть выше 1 мА, а напряжение выше 3 В при самой плохой конфигурации. Двойной фильтр на выходе обязателен.
Цепь тахогенератора
Напряжение сигнала от тахогенератора должно быть пропорционально скорости вращения двигателя. Для устойчивой работы к выходу тахогенератора необходимо подключить RC-фильтр. Выполнение этих факторов, дает сигнал постоянной амплитуды на выводе 12 на всем диапазоне скоростей вращения двигателя. Рекомендуется проверить, чтобы эта максимальная амплитуда находилась в пределах 1,0 В, чтобы иметь самое большое отношение сигнал/шум без перезапуска микросхемы (что может произойти, если напряжение на выводе 12 достигнет 5,5 В). Необходимо также проверить, чтобы сигнал на выводе 12 находился в балансе между «высоким значением» (более 300 мВ) и «низким». 8-полюсный тахогенератор — это минимум для стабильности на низких оборотах, а 16-полюсник еще лучше.
RC фильтр в цепи тахогенератора должен быть настроен на 30 Гц, чтобы быть как можно дальше от 150 Гц, что соответствует третьей гармонике сети переменного тока, генерируемой двигателем во время запуска. Кроме того, подключенный к выводу 12, высокоомный резистор, дает положительное смещение на этом выводе, устраняя шум, который может интерпретироваться как сигнал от тахогенератора. Это смещение должно быть спроектировано таким образом, чтобы на выводе 12 было не менее 200 мВ (отрицательное напряжение) при самой низкой скорости вращения двигателя.
Преобразователь частоты в напряжение
Емкость на выводе 11 имеет рекомендованное значение 820 пФ для 8-полюсных тахогенераторов с максимальной скоростью вращения двигателя 15000 об/мин, а сопротивление на выводе 11 всегда должно быть 470 кОм.
Сопротивление подключенное к выводу 4 должно выбираться так, чтобы давать 12 В при максимальной скорости вращения двигателя, чтобы максимизировать отношение сигнал / шум. Поскольку отношение FV / C, а также значение CPin 11 разделены, RPin 4 должно быть регулируемым. Оно должно состоять из постоянного резистора и подстроечного, составляющего 25% от их общего сопротивления. Регулировка при этом станет проще.
После регулировки, например, при максимальной скорости вращения двигателя, FV / C имеет остаточную нелинейность; коэффициент преобразования (мВ на один об / мин) увеличивается на 7,7% по мере того, как скорость приближается к нулю. Гарантированный разброс последнего очень узкий, максимальная ошибка при этом составит 1% от скорости вращения.
Следующие формулы определяют напряжение на выводе 4 (VPin 4) в вольтах:
120 k = Rint, (входное сопротивление на выводе 11)
Установка скорости вращения — (контакт 5) При проектировании подбирают цепь внешних резисторов, которые задают серию различных напряжений, соответствующих различным скоростям вращения двигателя. При переключении внешних резисторов необходимо убедиться убедитесь, что на контакт 5 не подается напряжение ниже 80 мВ. Если такое случиться, произойдет полная перезагрузка схемы.
Генератор разгона — (Pin 6) Если требуется только высокий темп разгона, соедините вывод 6 с землей.
При задании разгона, устанавливается напряжение на выводе 6, соответствующее точке разгона двигателя. Задание (или медленный разгон) будет продолжаться до момента, когда скорость двигателя достигнет удвоенного начального значения.
Соотношение двух напряжений может быть изменено вниз (рисунок 6) или вверх (рисунок 7).
Задаваемый разгон может быть уменьшен внешним резистором от VCC, заряжающим емкость на выводе7, добавляя его ток к току внутреннего генератор 5.0 мА.
Силовые цепи
Переключающий импульс симистора должен определяться резистором на выводе 13 в соответствии с потребностями в квадранте IV.Длительность запускающего импульса может быть нарушена шумовыми сигналами, генерируемыми самим симистором, которые интерферируют в пределах контактов 14 и 16, именно те, которые его определяют. Легко заметный, этот эффект безвреден.
Симистор должен быть защищен от скачков напряжения во внешней цепи питания цепочкой 100 нФ х 100 Ом.
Шунтирующий резистор должен быть как можно более неиндуктивным. Его можно изготовить, используя константановую проволоку.
Когда нагрузка представляет собой универсальный двигатель постоянного тока, подключенный через выпрямительный мост, симистор должен быть защищен от скачков напряжений при коммутации, катушкой 1,0-2,0 мГн, подключенной последовательно с выводом симистора MT2.
Функции синхронизации выполняются резисторами, определяющими напряжение в линии переменного тока и проводимость симистора. Значение 820 кОм является нормальным, но может быть уменьшено до 330 кОм для того, чтобы обнаруживать «нули» и уменьшить остаточную составляющую в линии постоянного тока ниже 20 мА.
Ограничение тока
Ограничитель тока начинает разряжать конденсатор 7 (опорная скорость), когда ток двигателя достигает заданного порогового уровня. Коэффициент усиления контура определяется резистором, соединяющим вывод 3 с последовательным шунтом. Опыт показал, что оптимальное значение для ограничения среднеквадратичного тока 10 A находится в пределах 2,0 кВт. Вывод 3 имеет чувствительность по току, которая ограничена разумными значениями и не должна реагировать на пиковые значения.
Если не используется, контакт 3 должен быть подключен к максимальному положительному напряжению 5,0 В вместо того, чтобы оставаться свободным.
Стабильность контура
Цепочка на выводе 16 является преобладающей и должна быть скорректирована экспериментально во время разработки модуля. Значения, указанные на рисунке 4, типичны для стиральных машин, но допускают большие изменения от одной модели к другой. R16 (единственное ограничение) не должен опускаться ниже 33 кОм, в противном случае ограничение скорости нарастания вызовет большие переходные ошибки при нагрузках.
Если вы нашли ошибку, пожалуйста, выделите фрагмент текста и нажмите Ctrl+Enter.
Как работает tda1085 схема
РЕГУЛЯТОР ОБОРОТОВ ДВИГАТЕЛЯ
Эта схема была скопирована при ремонте блока управления двигателя привода барабана стиральной машины — автомата фирмы Indesit. Как показала последующая практика, эта схема с небольшими изменениями довольно широко применяется и в машинах других фирм, у которых установлен электромеханический командоаппарат. Устройство обеспечивает стабильность частоты вращения коллекторного двигателя с установленным на его валу тахогенератором — датчиком оборотов. Подобную схему на специализированной микросхеме TDA1085C можно применить и других устройствах, например, кухонных комбайнах, швейных машинках, сверлильных станках и т. д. В этом случае счетверённый компаратор LM339N из схемы можно исключить вместе с элементами обвязки — в "родной" схеме компараторы используются для получения режима плавного изменения оборотов двигателя, вращающего барабан стиральной машины.
Управление оборотами двигателя осуществляется путём подачи на вход 5 микросхемы управляющего сигнала 0 . 10 В. В качестве тахогенератора можно использовать любой малогабаритный электродвигатель постоянного тока, например от детской игрушки, вал которого стыкуется с валом управляемого электродвигателя. Подстроечным резистором TR1 задают начальный режим вращения. Диод D1 следует заменить на 1N4007 для повышения надёжности. Резистор R21 определяет ток защиты от перегрузки и его сопротивление подбирается исходя из параметров конкретного электродвигателя. Симистор Т1 можно заменить на любой, подходящий по току и напряжению, например ВТ138-800, BTA26-600 и т. д.