Ручное управление шаговым двигателем
 В данной статье описывается простой способ ручного управления четырехполюсным однополярным шаговым двигателем. Для этого необходим галетный переключатель, восемь недорогих выпрямительных диодов и несколько других компонентов.
В данной статье описывается простой способ ручного управления четырехполюсным однополярным шаговым двигателем. Для этого необходим галетный переключатель, восемь недорогих выпрямительных диодов и несколько других компонентов.
Полная схема для ручного управления шаговым электродвигателем показана на рисунке 1. Поворачивая галетный переключатель S1 по часовой стрелке, шаговый двигатель вращается также по часовой стрелке. Поверните поворотный переключатель против часовой стрелки, а шаговый двигатель вращается против часовой стрелки. Поверните поворотный переключатель, и шаговый двигатель остановится с полным крутящим моментом (называемым удерживающим моментом). Это имитирует базовые функции управления, доступные со стандартного контроллера шагового двигателя – за исключением того, что ручной контроллер шагового двигателя работает полностью вручную. С помощью светодиода и геркона можно контролировать состояние двигателя, когда он завершит один полный оборот.

Рис.1. Схема устройства.
Возможные аврианты применения устройства – это позиционирование световых или вентиляционных отверстий, ручное вращение стрелок настенных часов, дистанционное управление роботами и роботизированными игрушками, видеокамерами. Для радиолюбителей возможно его применение в поворотных устройствах антенн, вращении конденсаторов в магнитных рамочных антеннах и т.п.
Четырехполюсный униполярный шаговый двигатель может, как правило, управляться четырьмя различными способами – каждый из которых имеет свои преимущества и недостатки:
- Управление волной (Wave control) – это самая простая форма управления, так как она возбуждает только одну обмотку (или фазу) за раз. Его главный недостаток – плохой крутящий момент.
- Полношаговое управление (Full-step control) – это простое средство управления с хорошим крутящим моментом, использующее одновременно две обмотки двигателя.
- Полушаговое управление (Half-step control) . Это более сложная форма управления,имеющая по сравнению с предыдущим методов в два раза больше шагов. Он имеет хороший крутящий момент и стабилизирует работу двигателя. Однако этот метод не подходит при ручном управлении.
- Микрошаговый контроль (Micro-steppping control) – это комплексная форма управления со сложной схемой, которая обеспечивает бесчисленные «промежуточные шаги» и высокую точность. Он часто используется в промышленности.
Для наших целей нам лючше всего подходит полношаговый контроль, так как он прост в реализации и имеет хороший крутящий момент. Для этого необходимо, чтобы 4-х битная управляющая последовательность двигалась вправо или влево по обмоткам шагового двигателя. Однополюсный четырехпозиционный галетный переключатель будет выполнять эту задачу с помощью мультиплексирования восемью диодами. Однако, поскольку такие переключатели обычно не имеют вращения на 360 градусов, вместо них используется тройной четырехпозиционный переключатель.
Следует отметить, что стандартный переключатель здесь не подходит , так как в момент переключения происходит кратковременная потеря питания на выводах двигателя во время вращения, что неблагоприятно скажется на крутящем моменте, особенно, если мотор установлен вертикально. Поэтому здесь используется переключатель ( make-before-break rotary switch ), который создает новый контакт перед тем как разорван предыдущий. Контакты переключаются как-бы в нахлест. Электролитический конденсатор C1 сглаживает мгновенный всплеск напряжения, когда переключатель перемещается. Если не требуется удерживающий крутящий момент, цепь питания может быть отключена, как только шаговый двигатель достигнет нужного положения. Момент затяжки (остаточный крутящий момент, когда шаговый двигатель выключен) обычно составляет одну десятую от состояния удержания крутящего момента. Красный светодиод. D9 указывает наличие питающего напряжения (состояние выключателя S3 – On/Off ).
Идентификация обмоток двигателя
Как известно, нет стандартного цветового кодирования для идентификации проводов четырехфазного униполярного шагового двигателя. Автор опробовал шесть шаговых двигателей, из которых только два имели одинаковую цветовую маркировку проводов! Такие двигатели иногда имеют пять выводов, иногда шесть, а иногда и восемь выводов (для каждой из четырех обмоток). К счастью, задача идентификации не слишком сложна. Первый шаг – найти общий провод или выводы. Шестивыводный четырехобмоточный шаговый двигатель имеет два общих провода, которые, скорее всего, находятся в центре двух рядов по три (они часто используются в принтерах или факсимильных аппаратах). Пятипроводный двигатель имеет один общий вывод. Эти двигатели обычно используется в 5-дюймовых дисководах.
Обмотки легко протестировать с помощью мультиметра: Если имеется шесть проводов – измерьте сопротивление на всевозможные комбинации выводов (например, зелено-белое, зелено-красное, бело-красное . ). Большое сопротивление указывает на последовательное соединение двух обмоток, а малое на отдельную обмотку. Когда определите центральные выводы – соедините их вместе.
В случае пяти проводов, находим только один провод, при котором измеряются самые низкие сопротивления. Это и будет общий провод.
Большинство четырехполюсных однополярных шаговых двигателей питаются напряжением 12 вольт или что-то около этого. Рекомендуется использовать регулируемый источник питания на 12 В, так как нерегулируемое питание может существенно повышаться 12 В, что может привести к чрезмерному нагреву двигателя или даже к перегоранию. Источник питания должен обеспечить мощность 6 Вт или 500 мА для небольших двигателей (диаметром от 3 до 4 см).
Следующим шагом является подключение общего провода двигателя к положительной клемме источника питания 12 В. Теперь возьмите отрицательный провод источника 12 В и поочередно подключите его к четырем выводам в различных последовательностях. После того, как вы нашли последовательность, которая продвигает двигатель небольшими шагами по часовой стрелке, обозначьте эти провода от А до D. То, что вы только что достигли – это управление волной (Wave Control), см. Таблицу 1.
Таблица 1: Wave Control
Наконец, обмотки А-D должны быть под напряжением в последовательности, которая показанная в таблице 2, и которая является полношаговым управлением (Full-step Control).
Таблица 2: Full-step Control
Таблица, нарисованная здесь, является наиболее логически последовательным способом, и вы сможете оценить смещение двоичной последовательности 1-0-0-1 по проводам шагового двигателя.
Графическое подключение обмоток (или фаз) от А до D показано на рисунке 2.

Рис.2 Униполярный привод.
Устройство собрано на макетной плате. Элементы переключения – галетник и тумблер включения питания монтируются на передней панеле прибора. Также на корпусе прибора установлено гнездо для подключения источника питания.


Рис.3. Компоновка элементов.
На галетном переключателе необходимо убрать ограничитель перемещения ползунка, чтобы он проворачивался по кругу.
В конструкции использованы резисторы мощностью 0.25W 5%, электролитический конденсаторы 1000 мкф на 16 В. Полупроводниковые диоды D1. D8 типа 1N4001 50V 1A . Светодиод D9 – 5 мм красный, D10 – 5 мм зеленый. Для контроля оборотов используется маленький магнит, который устанавливается на подвижной планке, закрепленной на валу шагового двигателя. Геркон фиксируется в подходящем месте и будет замыкаться в момент прохождения около него магнита.

Рис.4. Размещение элементов в корпусе.
В случае использования мощного шагового двигателя рекомендуется увеличить емкость электролитического конденсатора. При этом понадобится и более мощный исочник питания.

Хотя большинство 12 вольтовых однополярных шаговы двигателей рассчитаны на непрерывное питание, они могут достаточно ощутимо нагреваться. Если полный крутящий момент не требуется, простым решением является установка 15-омного проволочного резистора в одну из линий питания обмоток.
Тяговое усилие маленького четырехфазного униполярного шагового двигателя довольно сильно ощущается пальцами, и такие двигатели могут найти большое применений. Как видите, затраты на изготовление такого привода во много раз меньше, чем у обычной системы управления шаговым двигателем на микроконтроллерах или микросхемах. Примечание от RA3TOX.
На мой взгляд, самый дефицитный элемент в этом приводе – это галетный переключатель. Можно попытаться найти его на AliExpress по названию " make-before-break rotary switch " или переделать (расширить) подвижную пластину стандартного галетника. Есть керамические галетник с широким контактом, как показано на левом рисунке. На среднем рисунке галетник с узким коммутирующим контактом (самый распространенный вариант). Проще всего переделать контакты на коричневых открытых галетниках (правый рисунок). Из представленных образцов наиболее применим средний галетник (2 направления на 5 положений), но надо поискать такой с широким ползунковым контактом, при этом два крайних положения 4 и 5 следует замкнуть.



Несколько конструкций переключателей.
Шаговые двигатели не сильно отличаются от многих классических двигателей. Для управления шаговым двигателем необходимо подавать постоянное напряжение на обмотки в точной последовательности. Благодаря этому принципу, можно обеспечить точный угол поворота оси.
Более того, оставив напряжение питания на одной или нескольких обмотках двигателя, мы переводим двигатель в режим удержания. Шаговые двигатели получили широкое распространение в технике, к примеру, их можно найти в гибких дисководах, сканерах и принтерах. Существует несколько типов шаговых двигателей.
Типы шаговых двигателей
Существуют три основных типа шаговых двигателей:
- Двигатель с постоянным магнитом
- Двигатель с переменным магнитным сопротивлением
- Гибридный двигатель
Шаговый двигатель с постоянными магнитами
Шаговый двигатель с постоянными магнитами применяется наиболее часто в устройствах бытового назначения, нежели в промышленных устройствах. Это недорогой двигатель, имеющий низкий крутящий момент и низкую скорость вращения. Он идеально подходит для устройств компьютерной периферии.
Производство шагового двигателя с постоянными магнитами несложно и экономически оправдано, когда дело касается производства больших объемов. Однако из-за его относительной инертности, применение ограничено в устройствах, где требуется точное позиционирование по времени.
Шаговый двигатель с переменным магнитным сопротивлением
В шаговом двигателе с переменным магнитным сопротивлением нет постоянного магнита, и как результат этого — ротор вращается свободно, без остаточного крутящего момента. Этот тип двигателя часто используется в малогабаритных устройствах, например, в системах микро-позиционирования. Они не чувствительны к полярности тока и требуют систему управления отличную от других типов двигателей.
Гибридный шаговый двигатель
Гибридный двигатель, на сегодняшний день, является самым популярным двигателем в промышленной сфере. Его название происходит от того, что он сочетает в себе принципы работы двух других типов двигателя (с постоянными магнитами и переменным магнитным сопротивлением). Большинство гибридных двигателей имеют две фазы.
Как работает гибридный двигатель
Работу гибридного шагового двигателя легко понять, глядя на очень простую модель, которая производит 12 шагов за один оборот.
Ротор этой машины состоит из двух частей, каждая из которых имеет три зуба. Между двумя частями находится постоянный магнит, намагниченный в направлении оси ротора, создавая, таким образом, южный полюс на одной части детали, и северного полюса на другой. Статор состоит из трубки, имеющей четыре зуба внутри нее. Обмотки статора намотаны вокруг каждого такого зуба.
Когда ток протекает через одну из обмоток, ротор занимает одно из положений, показанных на рисунках. Это связано с тем что, постоянный магнит ротора пытается минимизировать магнитное сопротивление обмотки. Крутящий момент, что стремится держать ротор в этих положениях, как правило, небольшой и называется «релаксация крутящего момента». Ниже изображена схема работы двигателя с 12 шагами.
Если ток течет по двум обмоткам статора, результирующие полюса будут притягивать зубы обратной полярности на каждом конце ротора. Есть три устойчивых позиций для ротора, столько же, сколько количество зубьев на роторе. Момент, необходимый для перемещения ротора от его стабильного положения во вращательное движение называется «удержание крутящего момента»
Изменяя ток первой до второй обмотки (В), магнитное поле статора поворачивается на 90 градусов и притягивает новую пару полюсов ротора. В результате этого ротор поворачивается на 30 градусов, что соответствует полному шагу. Возвращение к первому набору обмоток статора, но с питанием обратной полярности, изменяет магнитное поле статора еще на 90 градусов, и ротор поворачивается на 30 градусов (С).
Наконец, второй набор обмоток работает в противоположном направлении, обеспечивая третье положение ротора (еще 30 градусов). Теперь мы можем вернуться снова к первому этапу (А), и после прохождения заново всех этих четырех этапов, ротор будет перемещен еще на один зуб.
Очевидно, что если полярность питания обмоток будет противоположной описанной, то вращение двигателя так же сменится на противоположное.
Режим полшага
Подавая питание поочередно на одну обмотку, а затем на две, ротор будет совершать вращение на 15 градусов в каждом шаге и таким образом количество шагов на один оборот увеличится в два раза. Этот режим называется режимом «полшага», и большинство промышленных устройств применяют этот режим. Даже если это иногда вызывает небольшую потерю крутящего момента, режим в полшага намного плавнее на низких скоростях и вызывает меньший резонанс в конце каждого шага.
Когда шаговый двигатель находится под контролем в режиме «неполного шага», две фазы одновременно находятся под напряжением и крутящий момент обеспечивается на каждом шаге. В режиме полушага, питание чередуется между двумя фазами, и отдельной обмоткой, как показано на рисунке.
Биполярные и униполярные шаговые двигатели
От того какая у шагового двигателя форма обмоток, двигатели делятся на униполярные и биполярные. У биполярного двигателя по 1 обмотке в каждой фазе. Всего две обмотки и соответственно 4 вывода (рис. а). Для обеспечения вращения вала на эти обмотки должно подаваться напряжение с изменяемой полярностью. Поэтому для биполярного двигателя необходим полумостовой либо мостовой драйвер, снабженный двухполярным питанием.
Униполярный двигатель также как и биполярный, для каждой фазы имеет по одной обмотке, но каждая обмотка содержит отвод от середины. В связи с этим, путем переключения половинок обмотки шагового двигателя, появляется возможность менять направление магнитного поля.
В данном случае значительно упрощается структура драйвера двигателя. Он должен обладать всего лишь четырьмя силовыми ключами. Соответственно, в униполярном двигателе применяется иной метод изменения направления магнитного поля. Отводы обмоток зачастую объединяются внутри двигателя, вследствие этого данный тип двигателя может обладать пятью или шестью проводами (рис. б).
Порой униполярные двигатели снабжаются четырьмя обмотками, каждая из которых содержит собственные выводы – то есть их всего восемь (рис. в). При определенном соединении этих обмоток подобный шаговый двигатель возможно использовать как биполярный либо униполярный. Кстати, униполярный двигатель, имеющий две обмотки с отводами по середине, возможно использовать и как биполярный. В этом случае провода, идущие от середины обмоток не используются.
Управление шаговым двигателем
В качестве примера управления шаговым двигателем возьмем униполярный шаговый двигатель ШД-1ЕМ, имеющий характеристики: количество шагов — 200/об., ток обмотки – 0,5А, мощность — 12 Ватт.
Драйвером, управляющим обмотками шагового двигателя выберем микросхему ULN2003A. Эта уникальная микросхема, не что иное, как транзисторная сборка по схеме Дарлингтона с открытым коллектором, снабженная диодом, защищающим цепь питания нагрузки. ULN2003A имеет семь каналов управления с током нагрузки 500мА каждый.
Входы микросхемы ULN2003A можно напрямую подключать к выходам цифровых микросхем, поскольку она имеет резисторы, подключенные к базам транзисторов. Еще одним немаловажным моментом является то, что выходы ULN2003A снабжены диодами, которые защищают микросхему от индукционных выбросов в момент коммутации обмоток шагового двигателя.
Вывод 9 микросхемы ULN2003A подведен к источнику питания через стабилитрон, который защищает схему от ЭДС самоиндукции, появляющейся в момент выключения блока питания схемы. Управление шаговым двигателем производится с помощью компьютера через LPT порт при помощи программы:
Тема раздела Общие вопросы в категории Станки ЧПУ, Hobby CNC, инструмент; Здравствуйте все, кто заглянул. Имеется шаговый двигатель PK266-02A. Задача – заставить его вращаться с переменной скоростью автономно без компьютера и .
Управление шаговым двигателем. Схема и описание. Как управлять шаговым двигателем вручную
 Двигатель
Двигатель
Не станет, у обмоток середина общая. Вот если удастся разъединить средний провод обмоток, то можно сделать биполярный, но это потребует разборки двигателя. Проще подключить через ULN2003 или подобным способом.
Драйвер шагового двигателя своими руками
Шаговый двигатель используется в машинах для точного перемещения. Наладим управление шаговым двигателем через USB с компьютера своими руками. Нам потребуется:
1) Шаговый двигатель, возьмем — Nema23 76 мм, вместо него может быть другой, управлять будем биполяным методом, любой гибридный и биполярный шаговый двигатель будет работать с таким же управлением.
2) Блок питания, возьмем — импульсный блок питания мощностью 360W с выходным напряжением 24V / 15A, может использоваться любой другой блок питания, если будет достаточно мощности и напряжения для работы двигателя. Более мощному двигателю будет нужно больше напряжения. Предел напряжения нашего драйвера ограничивается максимальным напряжением, которое выдерживают транзисторы, это 100V, у нас блок питания на 24V. В случае большего напряжения транзисторы в схеме необходимо заменить на более мощные, также при увеличении напряжения, транзисторы могут начать греться, если такое случилось, необходимо дополнительно обдувать их куллером (у меня все в порядке и куллер не требуется). Для подключения блока питания к сети 220V также нужен шнур и нужно определить где в вашей розетке ноль, а где фаза. Контакт блока N подключается к нулю, а L к фазе, также можно подключить заземление (но не обязательно). Определение возможно при помощи индикаторной отвертки, у меня определилось, что слева ноль, а справа фаза.
Как крутить шаговый двигатель
Шаговый двигатель работает от подачи комбинаций напряжения в разных направлениях на его обмотки, у этого шагового двигателя 2 обмотки — 4 провода, первая обмотка — черный (A) и зеленый (A*) провод, вторая обмотка — красный (B) и синий (B*). За одну смену комбинаций делается 1 шаг — 1,8 градусов. Если комбинации быстро менять, то двигатель будет быстро и точно позиционироваться — крутиться. Смена комбинаций возможна в двух направлениях, соответственно двигатель будет крутиться вперед или назад.
Чтобы крутить шаговый двигатель, надо:
1) Собрать устройство — USB контроллер шагового двигателя на микроконтроллере AVR и драйвер шагового двигателя, 2 в 1. Перед тем как собирать это сложное устройство, рекомендую сначало отдельно собрать и проверить работу только USB контроллера, его я уже собрал вот тут — контроллер USB. Если USB связь работает нормально, то можно приступать к изготовлению драйвера.
2) Написать программу для компьютера, которая будет посылать USB команды устройству.
3) Написать программу для микроконтроллера AVR, которая будет принимать USB команды и крутить двигатель.
Подчеркну, что речь идет о простых драйверах, которые не обеспечивают сложную форму тока и напряжения. Такие режимы используются на больших скоростях вращения.
Типы шаговых двигателей
Существуют три основных типа шаговых двигателей:
- Двигатель с постоянным магнитом
- Двигатель с переменным магнитным сопротивлением
- Гибридный двигатель
Шаговый двигатель с постоянными магнитами
Шаговый двигатель с постоянными магнитами применяется наиболее часто в устройствах бытового назначения, нежели в промышленных устройствах. Это недорогой двигатель, имеющий низкий крутящий момент и низкую скорость вращения. Он идеально подходит для устройств компьютерной периферии.
Производство шагового двигателя с постоянными магнитами несложно и экономически оправдано, когда дело касается производства больших объемов. Однако из-за его относительной инертности, применение ограничено в устройствах, где требуется точное позиционирование по времени.
Шаговый двигатель с переменным магнитным сопротивлением
В шаговом двигателе с переменным магнитным сопротивлением нет постоянного магнита, и как результат этого — ротор вращается свободно, без остаточного крутящего момента. Этот тип двигателя часто используется в малогабаритных устройствах, например, в системах микро-позиционирования. Они не чувствительны к полярности тока и требуют систему управления отличную от других типов двигателей.
Гибридный шаговый двигатель
Гибридный двигатель, на сегодняшний день, является самым популярным двигателем в промышленной сфере. Его название происходит от того, что он сочетает в себе принципы работы двух других типов двигателя (с постоянными магнитами и переменным магнитным сопротивлением). Большинство гибридных двигателей имеют две фазы.
Как работает гибридный двигатель
Работу гибридного шагового двигателя легко понять, глядя на очень простую модель, которая производит 12 шагов за один оборот.
Ротор этой машины состоит из двух частей, каждая из которых имеет три зуба. Между двумя частями находится постоянный магнит, намагниченный в направлении оси ротора, создавая, таким образом, южный полюс на одной части детали, и северного полюса на другой. Статор состоит из трубки, имеющей четыре зуба внутри нее. Обмотки статора намотаны вокруг каждого такого зуба.
Когда ток протекает через одну из обмоток, ротор занимает одно из положений, показанных на рисунках. Это связано с тем что, постоянный магнит ротора пытается минимизировать магнитное сопротивление обмотки. Крутящий момент, что стремится держать ротор в этих положениях, как правило, небольшой и называется «релаксация крутящего момента». Ниже изображена схема работы двигателя с 12 шагами.
Если ток течет по двум обмоткам статора, результирующие полюса будут притягивать зубы обратной полярности на каждом конце ротора. Есть три устойчивых позиций для ротора, столько же, сколько количество зубьев на роторе. Момент, необходимый для перемещения ротора от его стабильного положения во вращательное движение называется «удержание крутящего момента»
Изменяя ток первой до второй обмотки (В), магнитное поле статора поворачивается на 90 градусов и притягивает новую пару полюсов ротора. В результате этого ротор поворачивается на 30 градусов, что соответствует полному шагу. Возвращение к первому набору обмоток статора, но с питанием обратной полярности, изменяет магнитное поле статора еще на 90 градусов, и ротор поворачивается на 30 градусов (С).
Наконец, второй набор обмоток работает в противоположном направлении, обеспечивая третье положение ротора (еще 30 градусов). Теперь мы можем вернуться снова к первому этапу (А), и после прохождения заново всех этих четырех этапов, ротор будет перемещен еще на один зуб.
Очевидно, что если полярность питания обмоток будет противоположной описанной, то вращение двигателя так же сменится на противоположное.
Если в процессе управления используется возбуждение только одной обмотки в любой момент времени, то ротор будет поворачиваться на фиксированный угол, который будет удерживаться пока внешний момент не превысит момента удержания двигателя в точке равновесия.
Какой тип шагового двигателя у меня?
Если вручную покрутить ротор отключённого двигателя, то можно заметить, что он движется не плавно, а шагами. После того, как Вы покрутили ротор, замкните все провода двигателя и покрутите ротор повторно. Если ротор крутится также, значит у Вас реактивный двигатель. Если для вращения ротора требуется прикладывать больше усилий, значит у вас двигатель с постоянными магнитами или гибридный. Отличить двигатель с постоянными магнитами от гибридного можно подсчитав количество шагов в одном обороте. Для этого не обязательно считать все шаги, достаточно примерно понять, их меньше 50 или больше. Если меньше, значит у Вас двигатель с постоянными магнитами, а если больше, значит у Вас гибридный двигатель.
По типу соединения электромагнитов, шаговые двигатели делятся на: униполярные и биполярные.
На рисунке представлено упрощённое, схематическое, представление обмоток.
На самом деле, каждая обмотка состоит из нескольких обмоток электромагнитов, соединённых последовательно или параллельно
- Биполярный двигатель имеет 4 вывода. Выводы A и A питают обмотку AA, выводы B и B питают обмотку BB. Для включения электромагнита, на выводы обмотки необходимо подать разность потенциалов (два разных уровня), поэтому двигатель называется биполярным. Направление магнитного поля зависит от полярности потенциалов на выводах.
- Униполярный двигатель имеет 5 выводов. Центральные точки его обмоток соединены между собой и являются общим (пятым) выводом, который, обычно, подключают к GND. Для включения электромагнита, достаточно подать положительный потенциал на один из выводов обмотки, поэтому двигатель называется униполярным. Направление магнитного поля зависит от того, на какой именно вывод обмотки подан положительный потенциал.
- 6-выводной двигатель имеет ответвление от центральных точек обмоток, но обмотка AA не соединена с обмоткой BB. Если не использовать выводы центральных точек обмоток, то двигатель будет биполярным, а если эти выводы соединить и подключить к GND, то двигатель будет униполярным.
- 8-выводной двигатель является наиболее гибким в плане подключения электромагнитов. Данный двигатель можно не только использовать как биполярный или униполярный, но и самим определять, как соединить электромагниты обмоток, последовательно или параллельно.
Какой тип шагового двигателя у меня?
Если у Вашего двигателя 4 вывода, значит он биполярный. Если у Вашего двигателя 5 выводов, значит он униполярный. Но если у Вашего двигателя 6 и более выводов, то это не значит что некоторые из них являются центральными выводами катушек электромагнитов. Дело в том, что есть двигатели, некоторые выводы которых (обычно крайние), электрически замкнуты, так биполярный двигатель может иметь 6 выводов. Точно определить тип соединений, для двигателей с 6 и более выводами, можно только измеряя сопротивление между выводами.
-
Для работы шагового двигателя (вне зависимости от его вида) можно выбрать один из трех режимов работы:
- Полношаговый режим — ротор поворачивается на 1 шаг за 1 такт.
- Полушаговый режим — ротор поворачивается на ½ шага за 1 такт.
- Микрошаговый режим — ротор поворачивается на ¼, ⅛ и т.д. шагов за 1 такт.
Ниже рассмотрены режимы работы, на примере биполярного двигателя с постоянным магнитом и полным шагом 90°.
Полношаговый режим (одна фаза на полный шаг). Номинальные значения шагового двигателя указываются именно для этого режима.
Полношаговый режим (две фазы на полный шаг). Этот режим позволяет увеличить крутящий момент почти в половину от номинального.
Полушаговый режим. Этот режим позволяет увеличить количество шагов в полном обороте в два раза, при незначительном уменьшении крутящего момента.
Микрошаговый режим. Этот режим является наиболее распространённым, он позволяет увеличить количество шагов в полном обороте в четыре раза, благодаря неравномерному распределению токов в обмотках. Снижение токов можно достичь снижением напряжения (как показано на картинке) или подавать полное напряжение через подключаемую внешнюю нагрузку.
Если подавать уровни не «0» — «½» — «1» (как на картинке), а «0» — «¼» — «½» — «¾» — «1», то количество шагов в полном обороте увеличится не в 4 раза, а в 8 раз. Можно увеличить количество шагов в 16, 32, 64 раза и т.д., а если заменить дискретные уровни сигналов на синусоиды, то мотор будет вращаться плавно (без шагов).
Режимы пониженного энергопотребления — доступны только для 8-выводных двигателей. Эти режимы отличаются от обычных тем, что используют только половину фазы (половину электромагнитов). Данные режимы используются редко, так как они значительно снижают крутящий момент двигателя.
В системах управления электроприводами для отработки заданного угла или перемещения используют датчики обратной связи по углу или положению выходного вала исполнительного двигателя.
Где купить шаговый двигатель
Самые простые двигатели Варианты на сайте AliExpress:
| Шаговый двигатель Nema17 42BYGH 1.7A (17HS4401-S) для 3D принтера | Набор из 5 шаговых двигателей ULN2003 28BYJ-48 с платам драйверов для Ардуино | Шаговый двигатель с модулем драйвера 5V Stepper Motor 28BYJ-48 + ULN2003 |
| Еще один вариант шагового двигателя для Arduino 28BYJ-48 5V 4 Phase DC Motor + ULN2003 Drive Test Board | Набор из трех шаговых двигателей Nema17 Stepper Motor 42BYGH 1.7A (17HS4401) для 3D приентера | AliExpress.com Product – 3D Printer Parts StepStick A4988 DRV8825 Stepper Motor Driver With Heat sink Carrier Reprap RAMPS 1.4 1.5 1.6 MKS GEN V1.4 board |
Драйвер для управления шаговым двигателем
Драйвер – это устройство, которое связывает контроллер и шаговый двигатель. Для управления биполярным шаговым двигателем чаще всего используется драйверы L298N и ULN2003.
Работа двигателя в биполярном режиме имеет несколько преимуществ:
- Увеличение крутящего момента на 40% по сравнению с униполярными двигателями;
- Возможность применения двигателей с любой конфигурацией фазной обмотки.
Но существенным минусов в биполярном режиме является сложность самого драйвера. Драйвер униполярного привода требует всего 4 транзисторных ключа, для обеспечения работы драйвера биполярного привода требуется более сложная схема. С каждой обмоткой отдельно нужно проводить различные действия – подключение к источнику питания, отключение. Для такой коммутации используется схема-мост с четырьмя ключами.
Драйвер шагового двигателя на базе L298N
Этот мостовой драйвер управляет двигателем с током до 2 А и питанием до 46В. Модуль на основе драйвера L298N состоит из микросхемы L298N, системы охлаждения, клеммных колодок, разъемов для подключения сигналов, стабилизатора напряжения и защитных диодов.
Драйвер двигателя L298N
Драйвер шагового двигателя ULN2003
Описание драйвера шаговых двигателей UNL2003
Шаговые двигателями с модулями драйверов на базе ULN2003 – частые гости в мастерских Ардуино благодаря своей дешевизне и доступности. Как правило, за это приходится платить не очень высокой надежностью и точностью.
Другие драйвера
Существует другой вид драйверов – STEP/DIR драйверы. Это аппаратные модули, которые работают по протоколу STEP/DIR для связи с микроконтроллером. STEP/DIR драйверы расширяют возможности:
- Они позволяют стабилизировать фазные токи;
- Возможность установки микрошагового режима;
- Обеспечение защиты ключа от замыкания;
- Защита от перегрева;
- Оптоизоляция сигнала управления, высокая защищенность от помех.
В STEP/DIR драйверах используется 3 сигнала:
- STEP – импульс, который инициирует поворот на шаг/часть шага в зависимости от режима. От частоты следования импульсов будет определяться скорость вращения двигателя.
- DIR – сигнал, который задает направление вращения. Обычно при подаче высокого сигнала производится вращение по часовой стрелке. Этот тип сигнала формируется перед импульсом STEP.
- ENABLE – разрешение/запрет работы драйвера. С помощью этого сигнала можно остановить работу двигателя в режиме без тока удержания.
Одним из самых недорогих STEP/DIR драйверов является модуль TB6560-V2. Этот драйвер обеспечивает все необходимые функции и режимы.
Если напряжение той же полярности подается на обмотки D и C, электромагнитное поле сместится. Это заставит повернуться ротор с постоянным магнитом в положение 2. В этом случае угол поворота равен 90°. Этот угол и будет шагом поворота ротора.
Конструкция шагового электродвигателя
Шаговый двигатель, как и любой вращающийся электродвигатель, состоит из ротора и статора. Статор — неподвижная часть, ротор — вращающаяся часть.
Шаговые двигатели надежны и недороги, так как ротор не имеет контактных колец и коллектора. Ротор имеет либо явно выраженные полюса, либо тонкие зубья. Реактивный шаговый двигатель — имеет ротор из магнитомягкого материала с явно выраженными полюсами. Шаговый двигатель с постоянными магнитами имеет ротор на постоянных магнитах. Гибридный шаговый двигатель имеет составной ротор включающий полюсные наконечники (зубья) из магнитомягкого материала и постоянные магниты. Определить имеет ротор постоянные магниты или нет можно посредством вращения обесточенного двигателя, если при вращении имеется фиксирующий момент и/или пульсации значит ротор выполнен на постоянных магнитах.
Статор шагового двигателя имеет сердечник с явно выраженными полюсами, который обычно делается из ламинированных штампованных листов электротехнической стали для уменьшения вихревых токов и уменьшения нагрева. Статор шагового двигателя обычно имеет от двух до пяти фаз.
Характеристики
Так как шаговый двигатель не предназначен для непрерывного вращения в его параметрах не указывают мощность. Шаговый двигатель — маломощный двигатель по сравнению с другими электродвигателями.
Одним из определяющих параметров шагового двигателя является шаг ротора, то есть угол поворота ротора, соответствующий одному импульсу. Шаговый двигатель делает один шаг в единицу времени в момент изменения импульсов управления. Величина шага зависит от конструкции двигателя: количества обмоток, полюсов и зубьев. В зависимости от конструкции двигателя величина шага может меняться в диапазоне от 90 до 0,75 градусов. С помощью системы управления можно еще добиться уменьшения шага пополам используя соответствующий метод управления.
Низкопороговые MOSFET транзисторы позволяют создать драйвер с более высоким параметрами. Применение в драйвере MOSFET транзисторов, например, IRF7341 дает следующие преимущества.
РЕЖИМЫ РАБОТЫ
СИНХРОННОГО ШАГОВОГО ДВИГАТЕЛЯ
Шаговый двигатель работает устойчиво, если в процессе отработки угла при подаче на его обмотки управления серии импульсов не происходит потери ни одного шага. Это значит, что в процессе отработки каждого из шагов ротор двигателя занимает устойчивое равновесие по отношению к вектору результирующей магнитной индукции дискретно вращающегося магнитного поля статора.
Режим отработки единичных шагов соответствует частоте импульсов управления, подаваемых на обмотки шагового двигателя, при которой шаговый двигатель отрабатывает до прихода следующего импульса заданный угол вращения. Это значит, что в начале каждого шага угловая скорость вращения двигателя равна 0.
При этом возможны колебания углового вала двигателя относительно установившегося значения. Эти колебания обусловлены запасом кинетической энергии, которая была накоплена валом двигателя при отработке угла. Кинетическая энергия преобразуется в потери: механические, магнитные и электрические. Чем больше величина перечисленных потерь, тем быстрее заканчивается переходный процесс отработки единичного шага двигателем.
В процессе пуска ротор может отставать от потока статора на шаг и более; в результате может быть расхождение между числом шагов ротора и потоком статора.
Основными характеристиками шагового двигателя являются: шаг, предельная механическая характеристика и приемистость.
Предельная механическая характеристика — это зависимость максимального синхронизирующего момента от частоты управляющих импульсов.
Приемистость — это наибольшая частота управляющих импульсов, при которой не происходит потери или добавления шага при их отработке. Она является основным показателем переходного режима шагового двигателя. Приемистость растет с увеличением синхронизирующего момента, а также с уменьшением шага, момента инерции вращающихся (или линейно перемещаемых) частей и статического момента сопротивления.
Двигатель с р парами полюсов имеет зубчатый ротор в виде звездочки с равномерно расположенными вдоль окружности 2р постоянными магнитами. Для многополюсной машины величина углового шага ротора равна:
Типы шаговых двигателей
Для обеспечения различных параметров работы важна как величина шага, на который будет смещаться вал, так и момент, прилагаемый для перемещения. Вариации данных параметров достигаются за счет конструкции самого ротора, способа подключения и конструкции обмоток.
По конструкции ротора
Вращаемый элемент обеспечивает магнитное взаимодействие с электромагнитным полем статора. Поэтому его конструкция и технические особенности напрямую определяют режим работы и параметры вращения шагового агрегата. Чтобы на практике определить тип шагового мотора, при обесточенной сети необходимо провернуть вал, если ощущаете сопротивление, то это свидетельствует о наличии магнита, в противном случае, это конструкция без магнитного сопротивления.
Сфера применения
Наиболее широкое применение шаговые двигатели нашли в автомобильной промышленности, в производстве оборудования различного назначения и всевозможной бытовой техники. Основная цель — максимально автоматизировать производственный процесс.
Шаговыми двигателями оснащаются станки с числовым программным управлением (например, 3D фрезерные станки с ЧПУ, фрезерные станки с ЧПУ по алюминию и другие).
Возможность точного позиционирования делает эти механизмы незаменимыми в работе устройств хранения информации.
Высокая надежность и отличные технические характеристики данной разновидности двигателей обуславливают их широкую востребованность в военной промышленности.
Как управлять шаговым двигателем вручную
 Лампы и фары
Лампы и фары
Что собой представляет шаговый двигатель?
Чтобы иметь четкое представление о том, как управлять шаговым двигателем, следует в первую очередь ознакомиться с тем, что это такое.
Шаговый двигатель — это электродвигатель, в котором роторная часть перемещается на заданный угол за счет пульсирующего источника питания. Все типы шаговых электродвигателей относятся к классу бесщеточных.
Важно! При запуске двигателя создается небольшой момент. При этом двигатель способен демонстрировать отличные характеристики даже в состоянии покоя.
Дискретные импульсы используются для управления шаговым двигателем. Их формирование осуществляется непосредственно на приводе электродвигателя.
Сфера применения шаговых двигателей
Прежде чем рассматривать, как управлять шаговым двигателем, также будет полезно ознакомиться с областью применения этого механизма. Он находится в:
- периферийные устройства, используемые для реализации функций компьютеров;
- станки с числовым программным управлением;
- установки, используемые для считывания информации с оптических дисководов;
- компьютерные запоминающие устройства;
- перфораторы и множество других строительных приспособлений.
Важно! Двухфазные гибридные электродвигатели наиболее активно используются при создании всех типов установок. Кроме того, рассмотренные механизмы часто можно встретить в электроустановках, работающих по схеме «старт-стоп».
Типы и конструктивные особенности
Кроме всего прочего, для лучшего понимания того, как управлять шаговым двигателем, следует рассмотреть основные варианты. Шаговые двигатели различаются конструкцией ротора, типом используемых обмоток, а также типом управления. На каждой из этих особенностей стоит остановиться подробнее.
Отличия в конструкции ротора
Во многом от ротора зависит, с какой скоростью он будет вращаться и в каких режимах способен работать электродвигатель. В связи с этим двигатели могут быть:
- Реактивный. Их главная особенность – отсутствие магнита ротора. Для снижения индуктивных потерь при работе двигателя для его изготовления применяют специализированные сплавы. Магнитная сила, необходимая для перемещения ротора, создается за счет подачи напряжения от другой пары. В эксплуатации реактивные двигатели имеют довольно много общего с синхронными агрегатами.
- С магнитами. Движущая сила создается с помощью магнитов.
- Смешанный. В установке одновременно действуют несколько движущих факторов.
Каждый из представленных типов двигателей используется в разных областях машиностроения.
Отличия в типе обмоток
Плавность работы зависит от того, сколько обмоток используется в электродвигателе. Именно поэтому при выборе двигателя следует обращать на это внимание.
Важно! Ошибочно мнение, что количество фаз напрямую влияет на количество обмоток в двигателе. Правда в том, что даже 2-х фазный двигатель может иметь в своей конструкции 4 и более обмоток.
Варианты шаговых двигателей:
- Однополярный. Главной их особенностью является наличие принта в дизайне. Самым большим недостатком униполярных двигателей является относительно небольшой крутящий момент. Как правило, используют 5 или 6 контактов.
- Биполярный. К ним относятся двигатели, которые можно подключить к контроллеру 4 кранов для работы. Обмотки могут быть соединены последовательно или параллельно. Для выполнения перенаправления текущего потока используются специальные микросхемы. Они позволяют управлять работой двигателя в ручном режиме.
Несколько чаще используются биполярные двигатели, так как они способны генерировать такой же крутящий момент, но при гораздо более компактных размерах самого устройства.
Отличия в типе управления
Чтобы можно было легко манипулировать режимами работы механизма, были созданы различные системы управления. Вот наиболее распространенные:
- Волна. При таком типе управления возбуждается только одна обмотка. Из-за этого механизм имеет явный недостаток — малое значение создаваемого момента.
- Полный шаг. Все обмотки включаются одновременно.
- Полушаг. В таких двигателях геометрия двигателя разделена на 2 равные части. В результате появляется возможность добиться большего расширения при задании положения вала механизма.
Второй тип, благодаря удовлетворительным техническим характеристикам, используется чаще всего.
Принцип работы
Четкое понимание принципа работы механизма облегчает восприятие информации о том, как управлять шаговым двигателем.
Важно! В зависимости от типа электродвигателя конструктивные особенности могут существенно различаться. Однако принцип работы всех механизмов абсолютно одинаков.
Статор имеет 4 обмотки, расположенные по отношению друг к другу под углом 90°. При подаче напряжения на первую обмотку ротор перемещается на указанный выше угол.
При подаче напряжения на последовательные обмотки механизма ротор будет продолжать движение, пока не совершит полный оборот вокруг своей оси. После этого описанный процесс повторяется снова и так происходит до тех пор, пока не прекратится подача напряжения на обмотки.
Если необходимо изменить порядок вращения ротора, начните подавать импульсы в обратном порядке. Все типы шаговых электродвигателей дают пользователю возможность в зависимости от поставленной задачи самостоятельно изменять технические характеристики механизма. Делается это непосредственно за счет органов управления, позволяющих подстраивать мотор под разные конфигурации механизмов, в которых он используется.
Преимущества и недостатки
Чтобы знать, как наиболее эффективно управлять шаговым двигателем, нужно иметь представление о его основных достоинствах и недостатках.
К положительным сторонам механизма можно отнести:
- Высокая точность. При подаче напряжения на обмотку ротор поворачивается на определенный угол, который задается заранее.
- Долгий срок службы установки при условии своевременного обслуживания.
- Стабильность в работе.
- Элементарность ремонтных работ – любая сборочная единица может быть заменена «простыми» манипуляциями.
Установка рассматриваемого типа имеет и недостатки. Вот наиболее важные из них:
- Маленький момент. Единственным выходом из этой ситуации может быть улучшение динамических параметров машины с помощью специальных драйверов.
- Высокий уровень вибрации механизма при работе обусловлен его конструктивными особенностями.
- Сложность с набором скорости вращения ротора.
- Опасность «проскальзывания» ротора.
Разумеется, приведенный выше список слабых и сильных сторон механизма не является исчерпывающим. Однако этого вполне достаточно, чтобы понять, следует ли использовать шаговый двигатель в конкретной электроустановке, или есть смысл предпочесть другой механизм с другими технологическими особенностями.
Основные характеристики
Выбрав правильный механизм, а заодно изучив информацию о том, как максимально эффективно управлять шаговым двигателем, следует выяснить, какими характеристиками он обладает. Ниже приведены основные моменты:
- Количество полных шагов. Этот параметр напрямую влияет на то, насколько плавно будет работать мотор.
- Сопротивление обмотки. От этого показателя зависит величина напряжения, выдаваемого устройством.
- Фазная индуктивность.
- Допустимый уровень напряжения. Измерение этого параметра осуществляется в соответствии с количеством оборотов.
- Номинальный рабочий ток агрегата.
- Значение сопротивления изоляционного слоя механизма.
Совет: комплексное понимание всех технических характеристик механизма — один из самых эффективных способов выбрать оптимальный вариант электродвигателя для конкретной ситуации.
Подключение шагового двигателя
Для того чтобы потенциал подавался на обмотки правильно, необходим механизм, способный вырабатывать один или несколько импульсов сразу в определенной последовательности. Полупроводниковые установки, а также драйверы, усиливающие сигнал с выводов микроконтроллера, призваны справиться с этой задачей.
Важно! В некоторых случаях фаза двигателя будет потреблять около 100 мА, поэтому драйвер может питаться напрямую от платы Arduino.
Каждая клемма на контроллере формирует свой режим работы и подачу напряжения. Использование тех или иных выводов зависит от того, какой контекст используется в конкретном случае. В результате получается выполнить правильный подбор частоты вращения ротора. Существует несколько видов схем подключения:
- биполярный;
- двухполюсный с отводом, начинающимся в середине обмотки;
- однополярный (4 фазы);
- однополярный с 4 фазами и параллельным подключением;
- однополярный с 4 фазами и последовательным соединением.
Какой из них лучше, трудно сказать. Правильнее сказать, что у каждой схемы есть свой вариант использования, где она продемонстрирует наибольшую эффективность.
Управление шаговым двигателем
Когда все основные моменты, касающиеся технических характеристик, преимуществ и недостатков рассматриваемого механизма, изучены, можно переходить к вопросу, как управлять шаговым двигателем своими руками.
Чуть ранее были рассмотрены виды управления электрическим шаговым двигателем. Теперь стоит остановиться на существующих способах управления механизмом более подробно, и рассмотреть их с других функциональных сторон:
- Волновой метод управления. Он включает в себя возбуждение обмотки, к которой притягиваются полюса ротора. При этом механизм способен длительное время выдерживать повышенную нагрузку, так как в силу особенностей его конструкции на выходе высвобождается только часть крутящего момента.
- Полношаговый метод управления. 2 фазы возбуждаются одновременно. Этот метод управления обеспечивает наибольший крутящий момент при использовании параллельного соединения. Если, наоборот, обмотки соединить последовательно, можно получить максимальный ток и напряжение.
- Полушаговый метод управления. При нем одновременно осуществляется совмещение двух ранее описанных способов управления. Это позволяет последовательную подачу напряжения. Сначала он будет подаваться только на одну катушку, а затем я буду соединять ее с обеими. Такой способ подачи гарантирует фиксацию свойств на малых скоростях.
По наличию контроллера все шаровые двигатели делятся на:
- Проверить. Главное их преимущество в том, что у пользователя есть возможность управлять устройством в разных режимах. Основным элементом таких устройств является наличие в системе электронного устройства, способного выдавать ряд сигналов в определенной последовательности.
- Вышел из-под контроля. Используется в схемах Н-моста. Это включает в себя возможность изменить полярность, чтобы обеспечить реверсирование устройства. В зависимости от конкретной ситуации конструкция может быть основана как на транзисторном, так и на микросхемном принципе действия. Первоначально на мост подается напряжение, и только потом с помощью переключателей по обмоткам ротора двигаются токи.
Как видите, вручную управлять шаговыми двигателями без специальных контроллеров невозможно.
Применения драйвера для управления шаговым двигателем
Драйвер позволяет дать управление механизмом с учетом текущей ситуации.
Для информации! Можно сказать, что драйвер — это элемент схемы, который используется для регулирования работы обмоток двигателя путем подачи цифровых сигналов. В этом случае эти сигналы подаются на определенные обмотки и только в заранее заданной последовательности, которую можно запрограммировать для начала.
В зависимости от того, какой именно драйвер используется, он также может использоваться для реализации ряда дополнительных функций:
- контроль перегрузок по току;
- снизить электропитание при длительном простое устройства;
- обеспечивает защиту от воздействия обратного ЭДС.
Все драйверы, позволяющие управлять установкой, делятся на аналоговые, цифровые и содержат в конструкции энкодер. Стоит узнать, как управлять шаговым двигателем с помощью каждого из них.
Аналоговые
Аналоговые драйверы самые дешевые и надежные. Они позволяют осуществлять переменную подачу импульса на обмотки статора по заранее заданной программе. Они способны защитить рабочую цепь от короткого замыкания. Кроме того, отсутствует риск перегрева водителя.
Цифровые
Цифровые драйверы более современные. Они основаны на 32-битном процессоре. Прежде чем контролировать работу двигателя, вы можете установить все необходимые настройки системы.
Кроме того, цифровые драйверы позволяют защитить установку от перегрузок, а также выполнять пошаговое совместное использование на максимальном уровне. Для цифровых драйверов также характерна автоматическая настройка и снижение напряжения в ХХ.
С энкодером
Управляя системой с помощью драйвера с энкодером, вы можете:
- получать постоянную обратную связь о состоянии установки;
- стабильно поддерживать определенный крутящий момент и скорость вращения ротора;
- защитить от перегрузки по току;
- уменьшить нагрев двигателя.
Обратите внимание на следующее! Используя драйверы с энкодерами, можно не бояться задержек в работе механизма.
Купить любой из рассмотренных шаговых двигателей, а также сопутствующие механизмы можно с помощью онлайн-сервисов Яндекс Маркет или ОЗОН.
Теперь вопросов о том, как самому управлять шаговым двигателем, возникнуть не должно. При выборе шагового электродвигателя в первую очередь необходимо ориентироваться на задачи, которые он должен выполнять. Это, в свою очередь, зависит от конкретного типа установки, в которой должен быть размещен двигатель.
Понравилась статья? Расскажите своим друзьям: Оцените статью, это очень важно для нас: Голосовавших: 2 человека.
Средняя оценка: 5 из 5.
Быстрые движения под высоким напряжением, или почти вся правда об управлении шаговым мотором
Доброго времени суток вам, дорогие выродки и сочувствующие!
В этом посте я поделюсь своим опытом управления. Точнее — ступенчатое управление. А если быть точным, то мы хотим рассказать об управлении удивительным устройством — шаговым двигателем.
Что это за шаговый двигатель? В принципе, с точки зрения функциональности этот двигатель можно представить как обычный электродвигатель, где каждый оборот вала разбит на множество одинаковых, точно фиксированных шагов. Сдвигая определенное количество шагов, мы можем позиционировать вал шагового двигателя с высокой точностью и хорошей воспроизводимостью. Каждый шаг можно разбить на несколько шагов (называемых микрошагами) для повышения плавности работы двигателя, уменьшения резонансов и увеличения углового разрешения. Различия между полным степпингом (слева), 1/2 микрошага (в центре) и 1/16 микрошага (справа) видны невооруженным глазом:
К сожалению, все вышеперечисленные преимущества достигаются за счет значительной сложности системы управления шаговым двигателем (для простоты будем называть эту систему драйвером).
Теперь рассмотрим работу типичного шагового двигателя:
Из этой картинки видно, что шаговый двигатель в электрическом плане представляет собой два или более электромагнитов, которые необходимо переключать в определенном порядке, чтобы привести ротор в движение.
Отступление: В настоящее время существует два основных типа шаговых двигателей: униполярные и биполярные. Поскольку униполярные двигатели имеют меньший крутящий момент и худшие скоростные характеристики, в данной публикации они рассматриваться не будут.
Итак, вернемся к управлению биполярным мотором. Как бы парадоксально это ни звучало, часто легче обсуждать общие принципы на конкретных примерах. В качестве примера возьмем шаговый двигатель ST4118L1804-A от Nanotec. Почему именно этот двигатель и производитель? Причина проста: по основным характеристикам это типичный представитель моторов NEMA 17, которые широко используются в радиолюбительской практике, а также имеют достаточно подробную техническую документацию (которая полностью отсутствует у китайских noname моторов).
Основные особенности этого двигателя:
Рабочее напряжение 3,15 В
Рабочий ток 1,8 А
Сопротивление обмотки 1,75 Ом
Индуктивность обмотки 3,3 мГн
Удерживающий момент 0,5 Нм
Размер углового шага 1,8° (200 шагов на оборот ротора)
В этом случае важнее всего правильная интерпретация данных. Применяя закон Ома, получаем, что производитель указал рабочий ток и напряжение для постоянного тока, протекающего по обмоткам двигателя, без учета индуктивности.
Проверить: I = U/R, или 1,8 А = 3,15 В/1,75 Ом. Все сходится.
Каковы потери мощности при питании обмоток постоянным током?
Все просто: P = I x U, или 1,8 А х 3,15 В = 5,67 Вт. В полушаговом режиме возможна ситуация, когда ток протекает через обе обмотки двигателя, соответственно, теряемая мощность должна быть удвоена: 5,67 Вт х 2 = 11,34 Вт. Это достаточно много, и может привести к перегреву мотора. Это же значение является минимальной потребляемой мощностью для данного двигателя. Типичный 3D-принтер имеет пять таких двигателей, поэтому для питания драйверов требуется блок питания с минимальной мощностью 11,34 Вт x 5 = 56,7 Вт.
К этой цифре необходимо добавить электрическую мощность, преобразуемую двигателем в кинетическую или потенциальную энергию при работе принтера. Точный расчет этого эффекта дело достаточно сложное, на практике проще всего к расчетному тепловому эффекту добавить 75% и на этом расчеты завершить. Почему именно 75%? Дело в том, что обычный шаговый двигатель способен выполнять полезную работу примерно на 2/3 своей максимальной тепловой мощности. В этом случае для создания узла или устройства сначала выбирается подходящий двигатель (например, по крутящему моменту), а затем рассчитывается мощность источника питания.
Суммарная мощность блока питания пяти шаговых двигателей: 56,7 Вт x 1,75 = 99,225 Вт.
Конечно, на практике ни одно любительское устройство не использует моторы под максимальной нагрузкой, и реальная потребляемая мощность, скорее всего, будет намного ниже расчетной. Я, как человек ленивый и скупой, очень не люблю дважды делать одно и то же, поэтому всегда беру блок питания с некоторым запасом (то есть по расчетам выше).
Теперь пора приступить к определению минимально необходимого напряжения для блока питания. К сожалению, этому параметру в тематических публикациях уделяется незаслуженно мало внимания. Почему этот параметр так важен? Дело в том, что при вращении ротора шагового двигателя по катушкам протекает переменный ток, ограниченный не только активным, но и индуктивным сопротивлением обмоток.
Рассмотрим предоставленный производителем график зависимости крутящего момента нашего мотора от скорости вращения:

На графике есть две линии, показывающие зависимость крутящего момента от скорости для напряжения питания 24 В (красная линия) и 48 В (зеленая линия). Нетрудно заметить, что падение крутящего момента начинается примерно с 300 об/мин для 24 В и примерно с 600-700 об/мин для 48 В. Следует отметить, что производитель использует дорогие промышленные драйверы, недоступные любителям.
Почему так важно напряжение питания драйвера, если даже при питании от 12 В оно заведомо выше проходного значения напряжения питания шагового двигателя (3,15 В)? Дело в том, что шаговый двигатель управляется током, а не напряжением, и все современные драйверы являются источниками тока. В идеальном случае драйвер обеспечивает заданный ток в обмотках двигателя независимо от частоты вращения ротора, нагрузки, изменения температуры и других параметров. Это организовано за счет работы ШИМ-контроллера, часто управляемого довольно сложными алгоритмами.
Из технической документации нашего мотора видно, что для полного оборота ротор должен сделать 200 шагов, при 300 об/мин это будет 60000 шагов в минуту, или 1000 шагов в секунду. Это соответствует, попросту говоря, переменному току частотой 1 кГц. При этой частоте индуктивное сопротивление обмотки составит (R(L) = 2π×F×L): 2π х 1 кГц х 3,3 мГн = 20,73 Ом. Какое напряжение необходимо для обеспечения тока 1,8 А с помощью этого резистора? Закон Ома не спит (U=IR): 1,8 А х 20,73 Ом = 37,31 В. Неудивительно, что выше скорости 300 об/мин наблюдается снижение крутящего момента: драйверу просто не хватает напряжения питания.
Почему при таком явном недостатке мощности (37 — 24 = 13 В) снижение происходит на меньшей скорости? Дело в том, что современные драйверы используют мостовую схему выходных каскадов, что позволяет «удвоить» напряжение, подаваемое на обмотки двигателя. То есть теоретически драйвер способен подать на обмотки «виртуальные» 48 В при напряжении питания 24 В, что создает теоретический запас по напряжению 48 — 37 = 11 В. На практике этот запас будет уравновешен потерями в драйвере, сопутствующих цепях и активным сопротивлением обмотки двигателя (активное сопротивление обмоток присутствует постоянно, и даже несколько увеличивается по мере прогрева двигателя).
При увеличении частоты вращения ротора свыше 300 об/мин пропорционально увеличивается частота импульсов, а следовательно, увеличивается индуктивное сопротивление обмотки. При питании от 24 В драйверу уже не хватает напряжения питания для поддержания тока в обмотках, и крутящий момент неуклонно падает. То же самое происходит при питании драйвера от 48 В, но значительно позже, при скорости 600-700 об/мин.
Итак, с мощностью и напряжением блока питания все ясно, теперь необходимо перейти к практической реализации универсального драйвера, способного как филигранно работать с использованием крошечного NEMA 11, так и сотрясать устои мира вместе с могучим NEMA 23. Какими самыми важными качествами обладает водитель моей мечты?
- Высокое напряжение питания. Так как в технической документации на двигатели редко указывается максимальное напряжение питания, то лучше будет ограничиться 48 В.
- Самый важный параметр: высокий выходной ток. NEMA 23 имеет рабочий ток до 3,5 А, драйвер должен обеспечивать этот ток с запасом 30%. Путем несложных расчетов получаем максимальный рабочий ток ок. 4,5 А.
- Простая и быстрая регулировка выходного тока.
- Наличие микрошага, не менее 1/8 шага
- Наличие защиты от короткого замыкания, перегрева и тд
- Небольшие размеры, возможность присоединения любого радиатора.
- Конструкция в виде интегральной схемы. XXI век на дворе!
- Простая схема включения с минимальным количеством дискретных компонентов.
- Низкая цена.
После многих бессонных ночей с пятиминутным гугловским копанием оказалось, что единственный доступный драйверный чип с подходящими параметрами — это TB6600HG. Покупка готового китайского драйвера на eBay показала, что далеко не все в Датском королевстве благополучно. В частности, китайский драйвер отказался работать напрямую с выходами Arduino Due, «наматывая» только через преобразователь уровня буфера.
Работая с трехамперной нагрузкой, драйвер перегревался и терял десятки шагов. Вскрытие пациента показало, что в нем не только был установлен чип предыдущего поколения (TB6560), но даже термопасте не нашлось места в списке компонентов. К тому же размеры и вес китайского водителя наводили на мысли о моей молодости. о прошлом веке, если быть совсем точным. Ну, черт возьми, сказал во мне интеллигент в третьем поколении, мы сделаем своего водителя, с преферансами и поэтессами. Если бы разработчики KiCAD увидели, как я обрабатываю их мозги, я бы разорился на одних только юристах:
Для минимизации размеров была разработана четырехслойная печатная плата. К сожалению, этот факт исключает производство в домашних условиях. Поэтому у берлинской компании LeitOn было заказано 36 таких плат, каждая из которых стоила около пяти евро. Некоторые из этих досок позже были куплены у меня другими любителями, и в итоге оказалось, что производство досок не очень затратное дело.
Чипы TBB6600HG были заказаны на Aliexpress по 4 евро каждая, остальные компоненты заказаны на eBay, так как на один драйвер цена дискретных компонентов составила 2 евро. В качестве радиаторов были взяты пятисантиметровые отрезки П-образного алюминиевого профиля, пластиковые рамки распечатаны на 3D-принтере. Общая цена за водителя составила около 12 евро. Это разумная цена для драйвера со следующими характеристиками:
Напряжение питания от 8 до 42 вольт
Максимальный непрерывный рабочий ток 4,5 А, регулируется потенциометром
Микро шаг вниз до 1/16 шага
Защита: короткое замыкание, перегрев, низкое напряжение питания
Компактные размеры и малый вес
Работа с уровнями входного сигнала от 3,3 до 5,5 вольт
Шаговые двигатели: особенности и практические схемы управления. Часть 1

В одной из предыдущих статей на тему управления двигателями постоянного тока [1] был кратко упомянут один из типов двигателей постоянного тока, а именно – шаговый двигатель, описание которого вышло за рамки статьи, и было ограничено одной лишь ссылкой. Учитывая обращения читателей с просьбой раскрыть эту тему на страницах журнала РадиоЛоцман, автор и редакция выполняют эту просьбу.
Итак, что такое шаговые двигатели (англ. «stepper motor» или «stepping motor»)? Шаговый двигатель – это бесколлекторный двигатель постоянного тока, наиболее общие разновидности которого представлены на Рисунке 1. В некоторой технической литературе его ошибочно относят к многофазным (чаще двухфазным) двигателям. Это не совсем верно. Действительно, и это будет рассмотрено ниже, есть такой режим управления, который с некоторой натяжкой можно отнести к фазовому, но это совершенно не означает «фазовость» такого двигателя в общем понимании этого термина, применимом к двигателям переменного тока.
Какова же основная отличительная особенность шагового двигателя? Дело в том, что его конструкция разработана таким образом, что сдвиг ротора происходит скачкообразно, то есть пошагово, в ответ на импульс тока в его обмотках, создаваемый приложенным к ним напряжением. Начальный шаг задается конструктивно, и может быть уменьшен схемными ухищрениями, но не может быть увеличен. При этом в общем случае, естественно в зоне номинальных рабочих значений, важен сам факт наличия импульса, а не его длительность или амплитуда тока. В чем-то он напоминает шаговые реле, но если в реле «пошаговость» задается электромагнитом и храповиком, то в двигателях такого механизма нет. Все основано на взаимодействии магнитных полей ротора, который выполнен в виде постоянного магнита с N-полюсами, и статора, который содержит обмотки (в одном из типов двигателя они дополнены постоянными магнитами), формирующие переменный магнитный поток в соответствии с управляющими импульсами.
Что делает шаговые двигатели такими привлекательными для разработчиков, и что недостижимо с двигателями других типов? Шаговый двигатель имеет значительно бóльшую надежность и, что совсем немаловажно для целого ряда практических применений, он, в отличие от коллекторного двигателя, практически не увеличивает уровень паразитных электромагнитных и радиопомех. Причина кроется как раз в отсутствии подвижного контакта токосъемника. Однако отсутствие коллектора, переключающего для формирования момента вращения направление тока в обмотках, требует внешнего управления – коммутатора. Тут, повторю французскую пословицу – «За каждое удовольствие нужно платить».
Еще одна тонкость – шаговые двигатели, в отличие от всех остальных типов двигателей, могут давать не только привычное вращательное движение ротора, но и шаговое линейное – возвратно-поступательное, используемое, например, в приводах дисководов и принтеров, а также в актуаторах – управляемых точных клапанах (Рисунок 1в). Но главное преимущество шаговых двигателей – это точность позиционирования ротора и возможность его длительного удержания в заданном положении без перегрузки двигателя. Момент удержания у шаговых двигателей превышает момент вращения, поэтому удерживать ротор можно током меньшего уровня. Практическая реализация этой возможности будет продемонстрирована на конкретных примерах. Поскольку момент вращения таких двигателей максимален на малых скоростях (к этому мы еще вернемся), то в целом ряде применений можно отказаться от дорогостоящих редукторов. Перечисленное выше и есть самая характерная особенность и отличие шаговых двигателей от коллекторных двигателей постоянного тока. Это делает шаговые двигатели незаменимыми в системах точных приводов, когда требуется выполнять условия по позиционированию, а это – робототехника, станки, автоматы и пр. Справедливости ради отметим и основные недостатки. Их три: высокая цена, относительная сложность управления по сравнению с коллекторными двигателями и низкая скорость вращения.
В настоящее время имеются три основных типа шаговых двигателей.
-
Двигатели с переменным магнитным сопротивлением
Кроме различий в общей конструкции, шаговые двигатели отличаются еще и схемой включения обмоток. Имеются три варианта их конфигураций (Рисунок 3), в зависимости от которой двигатели делятся на униполярные (англ. «unipolar») и биполярные (англ. «bipolar»).
Униполярный двигатель (Рисунок 3а), имеет включенной одну обмотку в каждой фазе, с отводом от середины каждой обмотки. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, переключением ее половинок. Как правило, униполярный двигатель имеет 6 выводов, но средние выводы обмоток могут быть объединены внутри самого двигателя, поэтому такой двигатель может иметь и 5 выводов. Таким образом, если вам в руки попался неизвестный двигатель с шесть или пятью выводами – это гарантировано униполярный шаговый двигатель.
Биполярный двигатель (Рисунок 3б), имеет две обмотки, которые включаются поочередно в каждой фазе. Некоторые двигатели имеют четыре расщепленные обмотки (Рисунок 3в); по этой причине их ошибочно называют 4-фазными двигателями.
Что важно знать и учитывать в части особенностей включения обмоток статора? Нетрудно заметить, что униполярный шаговый двигатель можно использовать в биполярном включении; двигатель с расщепленными обмотками, при соответствующем соединении обмоток, можно использовать и как униполярный, и как биполярный. Кроме того, двигатель с таким вариантом исполнения обмоток может использоваться с параллельным и последовательным включением обмоток. Это позволяет увеличить момент, развиваемый двигателем при низком напряжении питания (параллельное включение обмоток), или уменьшить ток потребления с увеличением питающего обмотки напряжения (последовательное включение обмоток). Фазировка обмоток важна – она определяет направление вращения двигателя, и вообще его работоспособность. Обращаю внимание читателей, что пока никакой стандартизации цветов выводов шаговых двигателей нет, так что фазировку иногда приходится устанавливать экспериментально. Но, если вы ее и перепутаете, то ничего критического ни с двигателем, ни с системой управления не произойдет.
Нетрудно увидеть, что в двигателе с биполярным включением обмоток одновременно работают все обмотки, и момент, развиваемый двигателем, будет выше. Выигрыш в моменте вращения составляет примерно 40%.
Имеется несколько вариантов управления шаговым двигателем (Рисунок 4). Обращаю внимание читателей, что на рисунках приведена не форма напряжения, что вы обычно встретите в литературе и на интернет сайтах, а форма тока. Это важно! В управлении шаговым двигателем важен именно ток, а не приложенное к обмоткам напряжение, которое имеет прямоугольную форму.
Рассмотрим пока общие особенности. Итак, на Рисунке 4 показана форма тока в обмотках двигателя относительно нуля для четырех основных вариантов управления. Наиболее простой вариант – это попеременная коммутация фаз, при которой они не перекрываются, и в каждый момент времени включена только одна фаза (Рисунок 4а). Этот режим называют волновым (англ. «wave drive mode») или полношаговым режимом управления с одной фазой («one phase on full step mode»). Точки равновесия ротора для каждого шага совпадают с «естественными» точками равновесия у обесточенного двигателя. Недостатком этого способа управления является то, что для биполярного двигателя в один и тот же момент времени используется только 50% обмоток, а для униполярного – 25%. Это означает, что в таком режиме не может быть получен полный возможный момент вращения.
Чаще всего используется управление с перекрытием фаз, когда в одно и то же время включены обе обмотки (Рисунок 4б). В общем случае именно его и называют полношаговым режимом управления (англ. «full step mode» или «two-phase-on»). При этом способе управления ротор фиксируется в промежуточных позициях между полюсами статора, обеспечивая примерно на 40% больший момент, чем в предыдущем варианте с одной включенной фазой. Этот способ управления обеспечивает такой же угол шага, как и волновой, но положение точек равновесия ротора смещено на полшага, что часто не является критическим. Иногда это необходимо учитывать для двигателей с большим шагом, так как обесточенный двигатель, например с шагом 18° после остановки сместится на 9°. Чтобы ротор такого двигателя не смещался при выключении, на двигатель в режиме остановки подают некоторый ток удержания, который сохранит заданное положение ротора. Именно это свойство шагового двигателя позволяет обходиться без специальных электромагнитных или механических тормозных муфт и удерживающих систем.
Третий основной способ управления является комбинацией двух описанных ранее и называется полушаговым режимом («half step mode» или «one and two-phase-on»). В этом режиме двигатель за один импульс управления делает шаг, равный половине основного (Рисунок 4в). Этот режим требует более сложной схемы управления, но позволяет осуществлять более точное позиционирование ротора и уменьшает негативное влияние его механического резонанса. Иными словами, используя двигатель с угловым шагом 1.8°, мы получаем шаг, равный 0.9°.
Еще меньшую градацию, вернее, дробление шага, дают микрошаговые системы управления («micro stepping mode»), основанные на постепенном изменении тока в обмотках (Рисунок 4г). Такие системы достаточно сложны. Они требуют применения не только специальных ИМС драйверов с ЦАП, но и микропроцессорного управления. Именно этот режим часто приводит к путанице, в результате которой шаговые двигатели причисляют к многофазным двигателям переменного тока.
Увидеть «вживую» все тонкости процесса управления можно на сайте компании Nanotec Electronic [4]. Анимация, приведенная на сайте, позволяет увидеть «реальную» работу виртуального биполярного двигателя для полношагового (Fullstep) и микрошагового (Microstep) режимов управления. Интерфейс сайта достаточно прост. Скриншот примера анимации приведен на Рисунке 5.
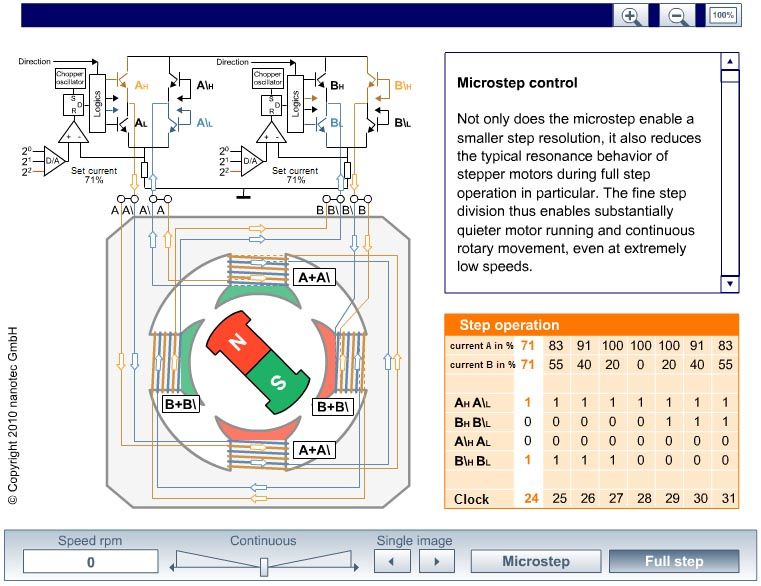 |
|
| Рисунок 5. | Анимация, иллюстрирующая работу биполярного двигателя. (С сайта компании Nanotec Electronic). |
На Рисунке 4 недаром приведена форма тока в обмотках, а не управляющего напряжения. Как известно, ток в индуктивности (а обмотка двигателя является индуктивностью) не может изменяться скачком, а растет по экспоненте до значения IMAX = VDC/R:
Требуемое для этого время определяется постоянной времени цепи τ = L/R. Здесь L – индуктивность обмотки двигателя, а R – общее сопротивление в цепи обмотки. Что из этого следует? Следует то, что при некоторой длительности импульса ток в обмотке не достигнет своего номинального значения, и момент на двигателе будет снижен, а при каких-то значениях длительности его ротор вообще не сдвинется с места. Вот этот эффект и ограничивает скорость вращения шагового двигателя. Проблема решается тремя способами. Первый заключается в том, что на некоторое начальное время напряжение на обмотке увеличивается, а потом уменьшается до номинального значения VDC= IMAXRL, где IMAX – максимальный номинальный ток обмотки, а RL – активное сопротивление обмотки. Это сложно, так как требует специальных схем управления с дополнительными ключами и источниками питания.
Классическим и самым простым методом оказывается включение последовательно с обмоткой двигателя дополнительного сопротивления с одновременным кратным увеличением напряжения питания VDC. Это и ускорит накопление тока в индуктивности, и не приведет к выходу двигателя из строя, так как требование по максимальному току обмотках не будет нарушено. В классической теории обычно используется режим L/5R, но на практике могут встречаться и иные варианты. Недостатком этого способа форсирования тока является необходимость использования мощных резисторов и энергетические потери, поэтому его применяют преимущественно для маломощных двигателей. Чтобы облегчить читателю освоение этого метода, рассмотрим один пример.
В спецификации двигателя P542-M48 [6] указан момент для режима L/4R, его сопротивление обмотки RL = 52.4 Ом, номинальное напряжение VDC = 12 В. Обращаю внимание читателей, что при указании L/4R имеется в виду общее сопротивление, то есть сумма собственного сопротивления обмотки RL и добавочного резистора номиналом 3RL, равного в нашем случае 157.2 Ом. Таким образом, при повышении напряжения питания до 4VDC на добавочных резисторах при малых скоростях вращения и, особенно, при остановке двигателя будет рассеиваться мощность:
Фактически, с учетом допустимого коэффициента нагрузки для резисторов, нам придется использовать добавочный резистор сопротивлением 160 Ом с рассеиваемой мощностью не менее 10 Вт.
Выходом из положения может быть использование импульсных стабилизаторов с ограничением максимального тока. Применение этого метода для коллекторных двигателей было рассмотрено в [1]. Повторим его суть. На двигатель от импульсного преобразователя подается повышенное в несколько раз напряжение, которое формирует ускоренный процесс заряда индуктивности обмоток. После достижения заданной величины тока преобразователь переходит из режима стабилизации напряжения в режим стабилизации тока и удерживает ток обмотки на заданном уровне. Именно этот режим питания обмоток показан на Рисунке 4 (видна нарезка). Это решение нельзя назвать дешевым, но его КПД несравненно выше, и в ряде случаев это единственный возможный для реализации вариант. Дело упрощает то, что обычно этот режим уже встроен в управляющую ИМС драйвера [2]. Сравнение методов управления током в обмотках двигателя показано на Рисунке 6.
| Рисунок 6. | Форма тока в обмотках шагового двигателя при различных вариантах питания [3]. |
Еще одним препятствием на пути использования шаговых двигателей является явление механического резонанса, поскольку ротор не сразу устанавливается в новую позицию, а, являясь своеобразным маятником, совершает затухающие колебания. При каждом шаге происходит толчок ротора, который, как и любая свободно подвешенная механическая система, начинает колебаться, и двигатель на некоторых частотах вращения теряет свой момент. Для подавления колебаний ротора используются либо механические методы (различного рода демпфирующие, притормаживающие фрикционные или бесфрикционные системы), либо используется микрошаговый режим управления. Системы управления с дроблением шага благодаря постепенному смещению ротора (основной шаг дробится на некоторую заданною системой управления величину, обычно 1/8, 1/16 или 1/32) уменьшают механические колебания ротора, сводя их практически к нулю.
Кроме описанных выше проблем, связанных с индуктивным характером шагового двигателя, как нагрузки для источника питания, ограничение по начальной стартовой скорости связано и с конструктивными особенностями, а именно с массой ротора, то есть его инерцией, о чем также упоминалось при рассмотрении способов коммутации обмоток. Иными словами, двигатель иногда необходимо разгонять до необходимой скорости. В некоторых спецификациях для шаговых двигателей приводятся две важные для разработчика кривые, показывающие зависимости момента, развиваемого на валу двигателя, от скорости вращения (Рисунок 7).
| Рисунок 7. | Зависимость момента от скорости вращения ротора двигателя серии DSH56 [5]. |
Внутренняя кривая (кривая старта, или «pull-in torque») показывает, при каком максимальном для данной скорости внешнем тормозящем моменте шаговый двигатель способен тронуться без предварительного ускорения, то есть без разгона. Эта кривая пересекает ось скоростей в точке, называемой максимальной частотой старта. На более низких скоростях шаговый двигатель еще может синхронизировать себя с частотой шага, преодолев действие внешних сил и инерцию ротора. Необходимо заметить (а это часто умалчивается изготовителями), что этот параметр задается для определенного режима работы и включения обмоток двигателя (в данном случае он задан для полушагового режима в униполярном включении обмоток двигателя), а нагрузка двигателя при замере этого параметра является фрикционной, а не инерционной. То есть, ротор двигателя искусственно заторможен, что уменьшает его нежелательные колебания под воздействием импульса тока в обмотке, и, следовательно, скорость вращения двигателя будет выше. Режим управления для этого параметра так же важен, поскольку в полушаговом режиме резонансные явления уже уменьшены. Внешняя кривая (кривая разгона, или «pull-out torque») показывает, при каком максимальном моменте для данной скорости шаговый двигатель вообще способен поддерживать вращение без пропуска шагов, но уже с учетом того, что произведен плавный разгон двигателя. Кривая показывает максимальную скорость для данного двигателя без нагрузки. Этот параметр зависит от тока в обмотках двигателя и способа управления обмотками. Обычно рекомендуют использовать «запас прочности» по этим параметрам от 50% до 100% по сравнению с необходимым вращающим моментом. Это необходимо учитывать для гарантии получения заданных характеристик.
Таким образом, повторюсь (поскольку это важно), может потребоваться разгон двигателя на малых скоростях до необходимой рабочей скорости, а процесс остановки включает уменьшение скорости вращения двигателя до ее некоторого минимального значения с переводом в режим удержания. В противном случае гарантировать точность позиционирования ротора может быть невозможно. Более того, вследствие инерционности системы может произойти даже разрушение редуктора, если он используется. Ну и нельзя забывать о подтормаживании, которое в любом случае оказывается не просто полезным, а часто и необходимым для точного позиционирования в системах со сложными приводами, использующими редукторы или передачи, но это уже относится не непосредственно к шаговому двигателю, а к системе привода в целом.