5.2. Устройство асинхронного двигателя
Асинхронный двигатель состоит из двух основных частей, разделенных воздушным зазором: неподвижного статора и вращающегося ротора. Каждая из этих частей имеет сердечник и обмотку. При этом обмотка статора включается в сеть и является как бы первичной, а обмотка ротора — вторичной, так как энергия в нее поступает из обмотки статора за счет магнитной связи между этими обмотками.
По своей конструкции асинхронные двигатели разделяются на два вида: двигатели с короткозамкнутым ротором и двигатели с фазным ротором. Рассмотрим устройство трехфазного асинхронного двигателя с короткозамкнутым ротором (рис.5.2). Двигатели этого вида имеют наиболее широкое применение.
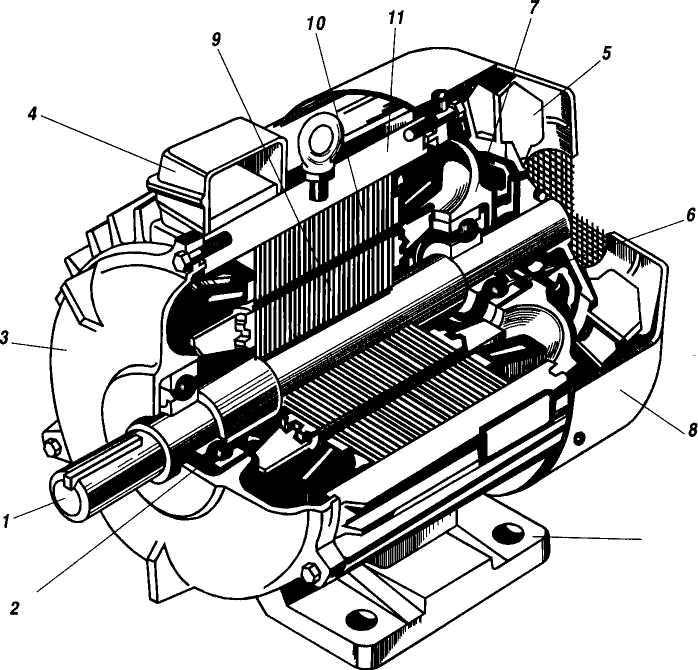
Рис.5.2. Устройство трехфазного асинхронного двигателя
с короткозамкнутым ротором:
1 — вал; 2, 6 — подшипники; 3, 7 — подшипниковые щиты; 4 — коробка выводов;
5 — вентилятор; 8 — кожух вентилятора; 9 — сердечник ротора с короткозамкну-
той обмоткой; 10 — сердечник статора с обмоткой; 11 — корпус; 12 — лапы
Неподвижная часть двигателя — статор — состоит из корпуса // и сердечника 10 с трехфазной обмоткой. Корпус двигателя отливают из алюминиевого сплава или из чугуна либо делают сварным. Рассматриваемый двигатель имеет закрытое обдуваемое исполнение. Поэтому поверхность его корпуса имеет ряд продольных ребер, назначение которых состоит в том, чтобы увеличить поверхность охлаждения двигателя.
В корпусе расположен сердечник статора 10, имеющий шихтованную конструкцию: отштампованные листы из тонколистовой электротехнической стали толщиной обычно 0,5 мм покрыты слоем изоляционного лака, собраны в пакет и скреплены специальными скобами или продольными сварными швами по наружной поверхности пакета. Такая конструкция Сердечника способствует значительному уменьшению вихревых токов, возникающих в процессе перемагничивания сердечника вращающимся магнитным полем. На внутренней поверхности сердечника статора имеются продольные пазы, в которых расположены пазовые части обмотки статора, соединенные в определенном порядке лобовыми частями, находящимися за пределами сердечника по его торцовым сторонам. Конструкция короткозамкнутого ротора приведена на рис.5.3.
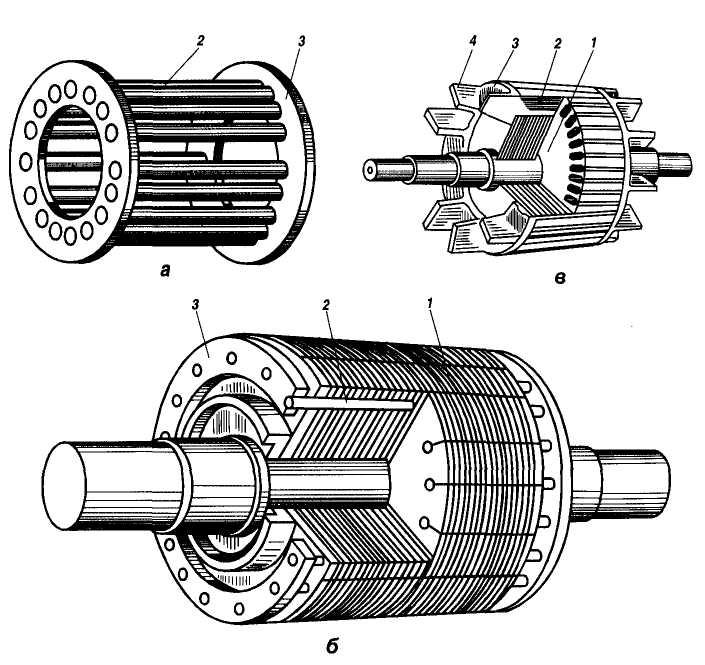
Рис.5.3. Конструкция короткозамкнутого ротора: а — беличья клетка; б — ротор с медной стержневой обмоткой; в — ротор с алюминиевой литой обмоткой;
1 — сердечник ротора; 2 — стержни; 3 — замыкающие кольца;
4 — лопасти вентилятора
Обмотка статора асинхронного электродвигателя может быть соединена звездой или треугольником. Схемы соединения представлены на рис.5.4
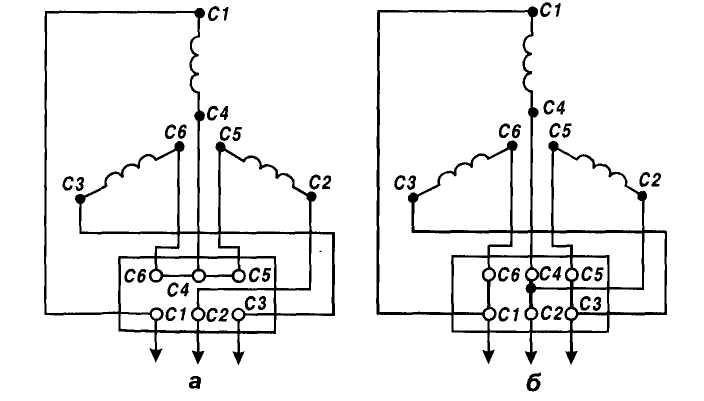
Рис.5.4. Схемы соединения выводов трехфазных обмоток электродвигателя:
а — звезда; б — треугольник
5.3. Принцип образования вращающегося магнитного поля
Принцип образования вращающегося магнитного поля рассмотрим на примере простейшей трехфазной двухполюсной обмотки, каждая фаза которой состоит из одной секции, фазы обмотки соединены звездой (рис.5.5). При этом секции тока в фазных обмотках (по времени) относительно друг друга на электрический угол 120° (рис.5.5, б). Проведем ряд построений вектора МДС трехфазной обмотки Fm, соответствующих различным моментам времениt0, t1, t2,t3отмеченным на графике рис.5.5, б.
В момент времени t0ток в фазе А равен 0, в фазе В ток имеет отрицательное, а в фазе С — положительное направления. Эти направления тока отмечаем на рис.5.5, б в сечениях обмоток статора для данного момента времени. При этом следует помнить, что за положительное направление тока
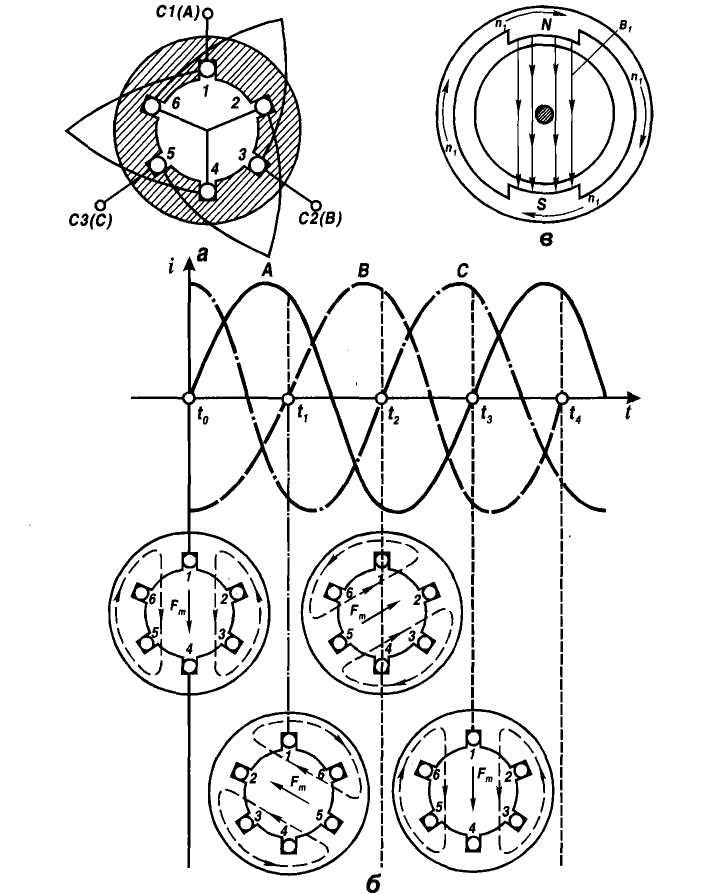
Рис.5.5. Получение вращающегося магнитного поля: а — трехфазная обмотка статора;
б — вращение МДС; в — модель магнитного поля статора;
1-4 — обмотка фазы А; 3-6 — обмотка фазы В;
5—2 — обмотка фазы С (первая цифра — начало обмотки)
в фазной обмотке принимается направление тока от начала обмотки к ее концу и обозначается х, а, следовательно, отрицательное направление тока в обмотке соответствует направлению тока от конца к началу и обозначается •. Затем в соответствии с указанными на рис. 5, б направлениями токов определяем (по правилу буравчика) направление вектора МДС трехфазной обмотки статора (вектор Fmнаправлен вниз).
В момент времени t1т.е. через (1/3) Т, ток в фазе В равен нулю, в фазе А имеет положительное, а в фазе С — отрицательное направление. Сделав построения, аналогичные моменту времени t0, заметим, что вектор МДС обмотки статора Fmпо сравнению с его положением в момент времени t0повернулся на 120° в направлении движения часовой стрелки.
Проведя аналогичные построения вектора МДС обмотки статора для момента t2и t3, видим, что каждый раз при переходе от одного момента времени к другому вектор Fmповорачивается на 120°, а за один период изменения токов в обмотках (с t0до t3) делает полный оборот (360°) и будет, таким образом, вращающимся. Вращающаяся МДС создает вращающееся магнитное поле, эквивалентное полю магнита N — S с индукцией Во (рис.5, в). Это поле вращается с синхронной частотойn0которая пропорциональна частоте переменного токаfи обратно пропорциональна числу пар полюсов обмоток статора р, т.е.
 ,
,
Трехфазный асинхронный двигатель
Трехфазный асинхронный двигатель с короткозамкнутым ротором
Конструкция асинхронного электродвигателя
Трехфазный асинхронный электродвигатель, как и любой электродвигатель, состоит из двух основных частей — статора и ротора. Статор — неподвижная часть, ротор — вращающаяся часть. Ротор размещается внутри статора. Между ротором и статором имеется небольшое расстояние, называемое воздушным зазором, обычно 0,5-2 мм.


Статор состоит из корпуса и сердечника с обмоткой. Сердечник статора собирается из тонколистовой технической стали толщиной обычно 0,5 мм, покрытой изоляционным лаком. Шихтованная конструкция сердечника способствует значительному снижению вихревых токов, возникающих в процессе перемагничивания сердечника вращающимся магнитным полем. Обмотки статора располагаются в пазах сердечника.


Ротор состоит из сердечника с короткозамкнутой обмоткой и вала. Сердечник ротора тоже имеет шихтованную конструкцию. При этом листы ротора не покрыты лаком, так как ток имеет небольшую частоту и оксидной пленки достаточно для ограничения вихревых токов.
Принцип работы. Вращающееся магнитное поле
Принцип действия трехфазного асинхронного электродвигателя основан на способности трехфазной обмотки при включении ее в сеть трехфазного тока создавать вращающееся магнитное поле.
Вращающееся магнитное поле — это основная концепция электрических двигателей и генераторов.

Частота вращения этого поля, или синхронная частота вращения прямо пропорциональна частоте переменного тока f1 и обратно пропорциональна числу пар полюсов р трехфазной обмотки.
- где n1 – частота вращения магнитного поля статора, об/мин,
- f1 – частота переменного тока, Гц,
- p – число пар полюсов
Концепция вращающегося магнитного поля
Чтобы понять феномен вращающегося магнитного поля лучше, рассмотрим упрощенную трехфазную обмотку с тремя витками. Ток текущий по проводнику создает магнитное поле вокруг него. На рисунке ниже показано поле создаваемое трехфазным переменным током в конкретный момент времени


Составляющие переменного тока будут изменяться со временем, в результате чего будет изменяться создаваемое ими магнитное поле. При этом результирующее магнитное поле трехфазной обмотки будет принимать разную ориентацию, сохраняя при этом одинаковую амплитуду.




Действие вращающегося магнитного поля на замкнутый виток
Теперь разместим замкнутый проводник внутри вращающегося магнитного поля. По закону электромагнитной индукции изменяющееся магнитное поле приведет к возникновению электродвижущей силы (ЭДС) в проводнике. В свою очередь ЭДС вызовет ток в проводнике. Таким образом, в магнитном поле будет находиться замкнутый проводник с током, на который согласно закону Ампера будет действовать сила, в результате чего контур начнет вращаться.

Короткозамкнутый ротор асинхронного двигателя
По этому принципу также работает асинхронный электродвигатель. Вместо рамки с током внутри асинхронного двигателя находится короткозамкнутый ротор по конструкции напоминающий беличье колесо. Короткозамкнутый ротор состоит из стержней накоротко замкнутых с торцов кольцами.

Трехфазный переменный ток, проходя по обмоткам статора, создает вращающееся магнитное поле. Таким образом, также как было описано ранее, в стержнях ротора будет индуцироваться ток, в результате чего ротор начнет вращаться. На рисунке ниже Вы можете заметить различие между индуцируемыми токами в стержнях. Это происходит из-за того что величина изменения магнитного поля отличается в разных парах стержней, из-за их разного расположения относительно поля. Изменение тока в стержнях будет изменяться со временем.


Вы также можете заметить, что стержни ротора наклонены относительно оси вращения. Это делается для того чтобы уменьшить высшие гармоники ЭДС и избавиться от пульсации момента. Если стержни были бы направлены вдоль оси вращения, то в них возникало бы пульсирующее магнитное поле из-за того, что магнитное сопротивление обмотки значительно выше магнитного сопротивления зубцов статора.
Скольжение асинхронного двигателя. Скорость вращения ротора
Отличительный признак асинхронного двигателя состоит в том, что частота вращения ротора n2 меньше синхронной частоты вращения магнитного поля статора n1.
Объясняется это тем, что ЭДС в стержнях обмотки ротора индуцируется только при неравенстве частот вращения n2<n1. Частота вращения поля статора относительно ротора определяется частотой скольжения ns=n1-n2. Отставание ротора от вращающегося поля статора характеризуется относительной величиной s, называемой скольжением:
- где s – скольжение асинхронного электродвигателя,
- n1 – частота вращения магнитного поля статора, об/мин,
- n2 – частота вращения ротора, об/мин,
Рассмотрим случай когда частота вращения ротора будет совпадать с частотой вращения магнитного поля статора. В таком случае относительное магнитное поле ротора будет постоянным, таким образом в стержнях ротора не будет создаваться ЭДС, а следовательно и ток. Это значит что сила действующая на ротор будет равна нулю. Таким образом ротор будет замедляться. После чего на стержни ротора опять будет действовать переменное магнитное поле, таким образом будет расти индуцируемый ток и сила. В реальности же ротор асинхронного электродвигателя никогда не достигнет скорости вращения магнитного поля статора. Ротор будет вращаться с некоторой скоростью которая немного меньше синхронной скорости.
Скольжение асинхронного двигателя может изменяться в диапазоне от 0 до 1, т. е. 0—100%. Если s
0, то это соответствует режиму холостого хода, когда ротор двигателя практически не испытывает противодействующего момента; если s=1 — режиму короткого замыкания, при котором ротор двигателя неподвижен (n2 = 0). Скольжение зависит от механической нагрузки на валу двигателя и с ее ростом увеличивается.
Скольжение, соответствующее номинальной нагрузке двигателя, называется номинальным скольжением. Для асинхронных двигателей малой и средней мощности номинальное скольжение изменяется в пределах от 8% до 2%.
Преобразование энергии
Асинхронный двигатель преобразует электрическую энергию подаваемую на обмотки статора, в механическую (вращение вала ротора). Но входная и выходная мощность не равны друг другу так как во время преобразования происходят потери энергии: на трение, нагрев, вихревые токи и потери на гистерезисе. Это энергия рассеивается как тепло. Поэтому асинхронный электродвигатель имеет вентилятор для охлаждения.
Подключение асинхронного двигателя
Трехфазный переменный ток
Электрическая сеть трехфазного переменного тока получила наиболее широкое распространение среди электрических систем передачи энергии. Главным преимуществом трехфазной системы по сравнению с однофазной и двухфазной системами является ее экономичность. В трехфазной цепи энергия передается по трем проводам, а токи текущие в разных проводах сдвинуты относительно друг друга по фазе на 120°, при этом синусоидальные ЭДС на разных фазах имеют одинаковую частоту и амплитуду.

Звезда и треугольник
Трехфазная обмотка статора электродвигателя соединяется по схеме «звезда» или «треугольник» в зависимости от напряжения питания сети. Концы трехфазной обмотки могут быть: соединены внутри электродвигателя (из двигателя выходит три провода), выведены наружу (выходит шесть проводов), выведены в распределительную коробку (в коробку выходит шесть проводов, из коробки три).
Фазное напряжение — разница потенциалов между началом и концом одной фазы. Другое определение для соединения «звезда»: фазное напряжение это разница потенциалов между линейным проводом и нейтралью (обратите внимание, что у схемы «треугольник» отсутствует нейтраль).
Линейное напряжение — разность потенциалов между двумя линейными проводами (между фазами).
| Звезда | Треугольник | Обозначение |
|---|---|---|
 |
 |
Uл, Uф — линейное и фазовое напряжение, В, |
 |
 |
Iл, Iф — линейный и фазовый ток, А, |
 |
 |
S — полная мощность, Вт |
 |
|
P — активная мощность, Вт |
S = 1,73∙380∙1 = 658 Вт.
Теперь изменим схему соединения на «треугольник», линейное напряжение останется таким же Uл=380 В, а фазовое напряжение увеличится в корень из 3 раз Uф=Uл=380 В. Увеличение фазового напряжения приведет к увеличению фазового тока в корень из 3 раз. Таким образом линейный ток схемы «треугольник» будет в три раза больше линейного тока схемы «звезда». А следовательно и потребляемая мощность будет в 3 раза больше:
S = 1,73∙380∙3 = 1975 Вт.
Таким образом, если двигатель рассчитан на подключение к трехфазной сети переменного тока по схеме «звезда», подключение данного электродвигателя по схеме «треугольник» может привести к его поломке.
Если в нормальном режиме электродвигатель подключен по схеме «треугольник», то для уменьшения пусковых токов на время пуска его можно соединить по схеме звезда. При этом вместе с пусковым током уменьшится также пусковой момент.
 Подключение электродвигателя по схеме звезда и треугольник
Подключение электродвигателя по схеме звезда и треугольник
Обозначение выводов статора трехфазного электродвигателя
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода | |
|---|---|---|
| Начало | Конец | |
| Открытая схема (число выводов 6) | ||
| первая фаза | U1 | U2 |
| вторая фаза | V1 | V2 |
| третья фаза | W1 | W2 |
| Соединение в звезду (число выводов 3 или 4) | ||
| первая фаза | U | |
| вторая фаза | V | |
| третья фаза | W | |
| точка звезды (нулевая точка) | N | |
| Соединение в треугольник (число выводов 3) | ||
| первый вывод | U | |
| второй вывод | V | |
| третий вывод | W | |
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода | |
|---|---|---|
| Начало | Конец | |
| Открытая схема (число выводов 6) | ||
| первая фаза | C1 | C4 |
| вторая фаза | C2 | C5 |
| третья фаза | C3 | C6 |
| Соединение звездой (число выводов 3 или 4) | ||
| первая фаза | C1 | |
| вторая фаза | C2 | |
| третья фаза | C3 | |
| нулевая точка | 0 | |
| Соединение треугольником (число выводов 3) | ||
| первый вывод | C1 | |
| второй вывод | C2 | |
| третий вывод | C3 | |
Подключение трехфазного асинхронного двигателя к однофазной сети с помощью фазосдвигающего элемента
Трехфазные асинхронные электродвигатели могут быть подключены к однофазной сети с помощью фазосдвигаюших элементов. При этом электродвигатель будет работать либо в режиме однофазного двигателя с пусковой обмоткой (рисунок а, б, г) либо в режиме конденсаторного двигателя с постоянно включенным рабочим конденсатором (рисунок в, д, е).
 Схемы подключения трехфазного асинхронного электродвигателя к однофазной сети
Схемы подключения трехфазного асинхронного электродвигателя к однофазной сети
Схемы приведенные на рисунке «а», «б», «д» применяются, когда выведены все шесть концов обмотки. Электродвигатели с соединением обмоток согласно схемам «а», «б», «г» практически равноценны двигателям, которые спроектированы как однофазные электродвигатели с пусковой обмоткой. Номинальная мощность при этом состовляет 40-50% от мощности в трехфазном режиме, а при работе с рабочим конденсатором 75-80%.
Емкость рабочего конденсатора при частоте тока 50 Гц для схем «в», «д», «е» примерно рассчитывается соответственно по формулам:



- ,где Cраб — емкость рабочего конденсатора, мкФ,
- Iном – номинальный (фазный) ток статора трехфазного двигателя, А,
- U1 – напряжение однофазной сети, В.
Управление асинхронным двигателем
-
Способы подключения асинхронного электродвигателя к сети питания:
- подключение от устройства плавного пуска
Прямое подключение к сети питания
Использование магнитных пускателей позволяет управлять асинхронными электродвигателями путем непосредственного подключения двигателя к сети переменного тока.
С помощью магнитных пускателей можно реализовать схему:
- нереверсивного пуска: пуск и остановка;
- реверсивного пуска: пуск, остановка и реверс.
Использование теплового реле позволяет осуществить защиту электродвигателя от величин тока намного превышающих номинальное значение.
Нереверсивная схема
 Нереверсивная схема подключения трехфазного асинхронного электродвигателя к трехфазной сети переменного электрического тока через магнитный пускатель
Нереверсивная схема подключения трехфазного асинхронного электродвигателя к трехфазной сети переменного электрического тока через магнитный пускатель
L1, L2, L3 — контакты для подключения к сети трехфазного переменного тока, QF1 — автоматический выключатель, SB1 — кнопка остановки, SB2 — кнопка пуска, KM1 — магнитный пускатель, KK1 — тепловое реле, HL1 — сигнальная лампа, M — трехфазный асинхронный двигатель
Реверсивная схема
 Реверсивная схема подключения трехфазного асинхронного электродвигателя к трехфазной сети переменного электрического тока через магнитные пускатели
Реверсивная схема подключения трехфазного асинхронного электродвигателя к трехфазной сети переменного электрического тока через магнитные пускатели
L1, L2, L3 — контакты для подключения к сети трехфазного переменного тока, QF1 — автоматический выключатель, KM1, KM2 — магнитные пускатели, KK1 — тепловое реле, M — трехфазный асинхронный двигатель, SB1 — кнопка остановки, SB2 — кнопка пуска «вперед», SB3 — кнопка пуска «назад» (реверс), HL1, HL2 — сигнальные лампы
Недостатком прямой коммутации обмоток асинхронного электродвигателя с сетью является наличие больших пусковых токов, во время запуска электродвигателя.
Плавный пуск асинхронного электродвигателя
В задачах, где не требуется регулировка скорости электродвигателя во время работы для уменьшения пусковых токов используется устройство плавного пуска.
Устройство плавного пуска защищает асинхронный электродвигатель от повреждений вызванных резким увеличением потребляемой энергии во время пуска путем ограничения пусковых токов. Устройство плавного пуска позволяет обеспечить плавный разгон и торможение асинхронного электродвигателя.
Устройство плавного пуска дешевле и компактнее частотного преобразователе. Применяется там, где регулировка скорости вращения и момента требуется только при запуске.
Частотное управление асинхронным электродвигателем
Для регулирования скорости вращения и момента асинхронного двигателя используют частотный преобразователь. Принцип действия частотного преобразователя основан на изменении частоты и напряжения переменного тока.
-
Использование частотного преобразователя позволяет:
- уменьшить энергопротребление электродвигателя;
- управлять скоростью вращения электродвигателя (плавный запуск и остановка, регулировка скорости во время работы);
- избежать перегрузок электродвигателя и тем самым увеличить его срок службы.
-
В зависимости от функционала частотные преобразователи реализуют следующие методы регулирования асинхронным электродвигателем: ; .
Скалярное управление является простым и дешевым в реализации, но имеет следующие недостатки — медленный отклик на изменение нагрузки и небольшой диапазон регулирования. Поэтому скалярное управление обычно используется в задачах, где нагрузка либо постоянна, либо изменяется по известному закону (например, управление вентиляторами).
 Скалярное управление асинхронным двигателем с датчиком скорости
Скалярное управление асинхронным двигателем с датчиком скорости
Векторное управление используется в задачах, где требуется независимо управлять скоростью и моментом электродвигателя (например, лифт), что, в частности, позволяет поддерживать постоянную скорость вращения при изменяющемся моменте нагрузки. При этом векторное управление является самым эффективным управлением с точки зрения КПД и увеличения времени работы электродвигателя.
Среди векторных методов управления асинхронными электродвигателями наиболее широкое применение получили: полеориентированное управление и прямое управление моментом.
 Полеориентированное управления асинхронным электродвигателем по датчику положения ротора
Полеориентированное управления асинхронным электродвигателем по датчику положения ротора
Полеориентированное управление позволяет плавно и точно управлять параметрами движения (скоростью и моментом), но при этом для его реализации требуется информация о направлениии вектора потокосцепления ротора двигателя.
-
По способу получения информации о положении потокосцепления ротора электродвигателя выделяют:
- полеориентированное управление по датчику;
- полеориентированное управление без датчика: положение потокосцепления ротора вычисляется математически на основе той информации, которая имеется в частотном преобразователе (напряжение питания, напряжения и токи статора, сопротивление и индуктивность обмоток статора и ротора, количество пар полюсов двигателя).
Прямое управление моментом имеет простую схему и высокую динамику работы, но при этом высокие пульсации момента и тока.
Трехфазный асинхронный двигатель с фазным ротором
До широкого распространения частотных преобразователей асинхронные двигатели средней и большой мощности делали с фазным ротором. Трехфазные асинхронные двигатели с фазным ротором (АДФР) обычно применяли в устройствах с тяжелыми условиями пуска, например в качестве крановых двигателей переменного тока, или же для привода устройств, требующих плавного регулирования частоты вращения.
Конструкция АДФР
Фазный ротор
Конструктивно фазный ротор представляет из себя трехфазную обмотку (аналогичную обмотки статора) уложенную в пазы сердечника фазного ротора. Концы фаз такой обмотки ротора обычно соединяются в «звезду», а начала подключают к контактным кольцам, изолированным друг от друга и от вала. Через щетки к контактным кольцам обычно присоединяется трехфазный пусковой или регулировочный реостат. Асинхронные двигатели с фазным ротором имеют более сложную конструкцию, чем у двигателей с короткозамкнутым ротором, однако обладают лучшими пусковыми и регулировочными свойствами.

Статор АДФР
Статор асинхронного двигателя с фазным ротором по конструкции не отличается от статора асинхронного двигателя с короткозамкнутым ротором.
Обозначение выводов вторичных обмоток трехфазного АДФР
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода | |
|---|---|---|
| Начало | Конец | |
| Открытая схема (число выводов 6) | ||
| первая фаза | K1 | K2 |
| вторая фаза | L1 | L2 |
| третья фаза | M1 | M2 |
| Соединение в звезду (число выводов 3 или 4) | ||
| первая фаза | K | |
| вторая фаза | L | |
| третья фаза | M | |
| точка звезды (нулевая точка) | Q | |
| Соединение в треугольник (число выводов 3) | ||
| первый вывод | K | |
| второй вывод | L | |
| третий вывод | M | |
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода | |
|---|---|---|
| Соединение звездой (число выводов 3 или 4) | ||
| первая фаза | Р1 | |
| вторая фаза | Р2 | |
| третья фаза | Р3 | |
| нулевая точка | 0 | |
| Соединение треугольником (число выводов 3) | ||
| первый вывод | Р1 | |
| второй вывод | Р2 | |
| третий вывод | Р3 | |
Пуск АДФР

Пуск двигателей с фазным ротором производится с помощью пускового реостата в цепи ротора.
Применяются проволочные и жидкостные реостаты.
Металлические реостаты являются ступенчатыми, и переключение с одной ступени на другую осуществляется либо вручную с помощью рукоятки контроллера, существенным элементом которого является вал с укрепленными на нем контактами, либо же автоматически с помощью контакторов или контроллера с электрическим приводом.
Жидкостный реостат представляет собой сосуд с электролитом, в котором опущены электроды. Сопротивление реостата регулируется путем изменения глубины погружения электродов [3].
Для повышения КПД и снижения износа щеток некоторые АДФР содержат специальное устройство (короткозамкнутый механизм), которое после запуска поднимает щетки и замыкает кольца.
При реостатном пуске достигаются благоприятные пусковые характеристики, так как высокие значения моментов достигаются при невысоких значениях пусковых токов. В настоящее время АДФР заменяются комбинацией асинхронного электродвигателя с короткозамкнутым ротором и частотным преобразователем.
Асинхронные электродвигатели с короткозамкнутым ротором. Конструктивные особенности и области применения
Асинхронный электродвигатель с короткозамкнутым ротором состоит из двух основных элементов: статора (представляет собой неподвижную, внешнюю часть электродвигателя) и ротора (подвижная, расположенная внутри статора часть электрической машины). Каждый из этих элементов состоит, в свою очередь, из сердечника и обмотки. Обмотку статора, которую подключают к сети, можно считать первичной, а обмотку ротора — вторичной.
Сердечник статора собирается из совокупности листов, изготовленных из электротехнической стали и покрытых специальным лаком. Так уменьшаются потери на вихревые токи. В открытых пазах сердечника укладываются трехфазные обмотки, расположенные симметрично под углом 120 градусов.
Ротор представляет собой вал, опирающийся на подшипники, на котором укреплены сердечник и обмотки. Сердечник ротора также выполнен из набора штампованных листов. Обмотка ротора изготовлена из медных или алюминиевых стержней (размещенных в пазах его сердечника), концы которых соединены накоротко с кольцами. Это и есть короткозамкнутая роторная обмотка, внешний вид которой напоминает беличье колесо (рис. 1).
Принцип работы двигателя данного типа состоит в следующем. После подачи напряжения на обмотку статора появляется магнитный поток. Он изменяется с частотой, равной частоте используемого переменного тока. Из-за сдвига потоков в обмотках по времени и в пространстве результирующее поле получается вращающимся. Оно индуцирует ЭДС в проводниках ротора. В результате чего возникают токи, которые взаимодействуют с этим полем. Их взаимодействие создает пусковой момент. Ротор начинает вращаться в направлении вращающегося поля, но с другой частотой. Величину, характеризующуюся относительную разность этих частот, называют скольжением.
Трехфазный асинхронный короткозамкнутый электродвигатель получил наибольшее распространение среди машин подобного типа благодаря своим качествам и конструктивным особенностям:
- простоте конструкции;
- высокой надежности и долговечности;
- отсутствию подвижных контактов;
- низкой стоимости и универсальности.
Вместе с тем асинхронный двигатель с короткозамкнутым контуром имеет и существенные недостатки:
- ток, возникающий при пуске, по своему значению превышает номинальный почти в 5–7 раз, что приводит к значительному снижению напряжения в сети;
- затруднено регулирование числа оборотов ротора;
- сравнительно небольшой пусковой момент.
Асинхронные электродвигатели бывают различного технологического и конструктивного исполнения. В частности, электродвигатели АИР являются унифицированными для общепромышленных целей. Электродвигатель асинхронный трехфазный АИР имеет разные модификации. АИР представляет собой электродвигатель асинхронный трехфазный, характеристики которого аналогичны параметрам двигателей типа 5АМ, 5АИ, АМУ, 7АИ. Его устанавливают на вентиляторах, насосах, компрессорах и других электромеханических установках.
Асинхронный двигатель с короткозамкнутым ротором
Учитывая то, что электроснабжение традиционно осуществляется путём доставки потребителям переменного тока, понятно стремление к созданию электромашин, работающих на поставляемой электроэнергии. В частности, переменный ток активно используется в асинхронных электродвигателях, нашедших широкое применение во многих областях деятельности человека. Особого внимания заслуживает асинхронный двигатель с короткозамкнутым ротором, который в силу ряда причин занял прочные позиции в применении.
Секрет такой популярности состоит, прежде всего, в простоте конструкции и дешевизне его изготовления. У электромоторов на короткозамкнутых роторах есть и другие преимущества, о которых вы узнаете из данной статьи. А для начала рассмотрим конструктивные особенности этого типа электрических двигателей.
Конструкция
В каждом электромоторе есть две важных рабочих детали: ротор и статор. Они заключены в защитный кожух. Для охлаждения проводников обмотки на валу ротора установлен вентилятор. Это общий принцип строения всех типов электродвигателей.
Конструкции статоров рассматриваемых электродвигателей ничем не отличаются от строения этих деталей в других типах электромоторов, работающих в сетях переменного тока. Сердечники статора, предназначенного для работы при трехфазном напряжении, располагаются по кругу под углом 120º. На них устанавливаются обмотки из изолированной медной проволоки определённого сечения, которые соединяются треугольником или звездой. Конструкция магнитопровода статора жёстко крепится на стенках цилиндрического корпуса.
Строение электродвигателя понятно из рисунка 1. Обратите внимание на конструкцию обмоток без сердечника в короткозамкнутом роторе.

Рис. 1. Строение асинхронного двигателя с КЗ Ротором
Немного по-другому устроен ротор. Конструкция его обмотки очень похожа на беличью клетку. Она состоит из алюминиевых стержней, концы которых замыкают короткозамыкающие кольца. В двигателях большой мощности в качестве короткозамкнутых обмоток ротора можно увидеть применение медных стержней. У этого металла низкое удельное сопротивление, но он дороже алюминия. К тому же медь быстрее плавится, а это не желательно, так как вихревые токи могут сильно нагревать сердечник.
Конструктивно стержни расположены поверх сердечников ротора, которые состоят из трансформаторной стали. При изготовлении роторов сердечники монтируют на валу, а проводники обмотки впрессовывают (заливают) в пазы магнитопровода. При этом нет необходимости в изоляции пазов сердечника. На рисунке 2 показано фото ротора с КЗ обмотками.

Рис. 2. Ротор асинхронного двигателя с КЗ обмотками
Пластины магнитопроводов таких роторов не требуют лаковой изоляции поверхностей. Они очень просты в изготовлении, что удешевляет себестоимость асинхронных электродвигателей, доля которых составляет до 90% от общего числа электромоторов.
Ротор асинхронно вращается внутри статора. Между этими деталями устанавливаются минимальные расстояния в виде воздушных зазоров. Оптимальный зазор находится в пределах от 0,5 мм до 2 мм.
В зависимости от количества используемых фаз асинхронные электродвигатели можно разделить на три типа:
-
;
- двухфазные;
- трёхфазные.
Они отличаются количеством и расположением обмоток статора. Модели с трехфазными обмотками отличаются высокой стабильностью работы при номинальной нагрузке. У них лучшие пусковые характеристики. Зачастую такие электродвигатели используют простую схему пуска.
Двухфазные двигатели имеют две перпендикулярно расположенных обмотки статора, на каждую из которых поступает переменный ток. Их часто используют в однофазных сетях – одну обмотку подключают напрямую к фазе, а для питания второй применяют фазосдвигающий конденсатор. Без этой детали вращение вала асинхронного электродвигателя самостоятельно не начнётся. В связи с тем, что конденсатор является неотъемлемой частью двухфазного электромотора, такие двигатели ещё называют конденсаторными.
В конструкции однофазного электродвигателя используют только одну рабочую обмотку. Для запуска вращения ротора применяют пусковую катушку индуктивности, которую через конденсатор кратковременно подключают к сети, либо замыкают накоротко. Эти маломощные моторчики используются в качестве электрических приводов некоторых бытовых приборов.
Принцип работы
Функционирование асинхронного двигателя осуществляется на основе свойства трёхфазного тока, способного создавать в обмотках статора вращающее магнитное поле. В рассматриваемых электродвигателях синхронная частота вращения электромагнитного поля связана прямо пропорциональной зависимостью с собственной частотой переменного тока.
Существует обратно пропорциональная зависимость частоты вращения от количества пар полюсов в обмотках статора. Учитывая то, что сдвиг фаз составляет 60º, зависимость частоты вращения ротора (в об/мин.) можно выразить формулой:
В результате действия магнитной индукции на сердечник ротора, в нём возникнет ЭДС, которая, в свою очередь, вызывает появление электрического тока в замкнутом проводнике. Возникнет сила Ампера, под действием которой замкнутый контур начнёт вращение вдогонку за магнитным полем. В номинальном режиме работы частота вращения ротора немного отстаёт от скорости вращения создаваемого в статоре магнитного поля. При совпадении частот происходит прекращение магнитного потока, ток исчезает в обмотках ротора, вследствие чего прекращается действие силы. Как только скорость вращения вала отстанет, переменными токами магнитных полей, возобновляется действие амперовой силы.
Разницу частот вращения магнитных полей называют частотой скольжения: ns=n1–n2, а относительную величину s, характеризующую отставание, называют скольжением.
s = 100% * ( ns / n1) = 100% * (n1 — n2) / n1 , где ns – частота скольжения; n1, n2 – частоты вращений статорных и роторных магнитных полей соответственно.
С целью уменьшения гармоник ЭДС и сглаживания пульсаций момента силы, стержни короткозамкнутых витков немного скашивают. Взгляните ещё раз на рис. 2 и обратите внимание на расположение стержней, выполняющих роль обмоток ротора, относительно оси вращения.
Скольжение зависит от того, какую механическую нагрузку приложено к валу двигателя. В асинхронных электромоторах изменение параметров скольжения происходит в диапазоне от 0 до 1. Причём в режиме холостого хода набравший обороты ротор почти не испытывает активного сопротивления. S приближается к нулю.
Увеличение нагрузки способствует увеличению скольжения, которое может достигнуть единицы, в момент остановки двигателя из-за перегрузки. Такое состояние равносильно режиму короткого замыкания и может вывести устройство из строя.
Относительная величина отставания соответствующая номинальной нагрузке электрической машины называется номинальным скольжением. Для маломощных электромоторов и двигателей средней мощности этот показатель изменяется в небольших пределах – от 8% до 2%. При неподвижности ротора электродвигателя скольжение стремится к 0, а при работе на холостом ходу оно приближается к 100%.
Во время запуска электромотора его обмотки испытывают нагрузку, что приводит к резкому увеличению пусковых токов. При достижении номинальных мощностей электрические двигатели с короткозамкнутыми витками самостоятельно восстанавливают номинальную частоту ротора.
Обратите внимание на кривую крутящего момента скольжения, изображённую на рис. 3.

Рис. 3. Кривая крутящего момента скольжения
При увеличении крутящего момента коэффициент s изменяется от 1 до 0 (см. отрезок «моторная область»). Возрастает также скорость вращения вала. Если скорость вращения вала превысит номинальную частоту, то крутящий момент станет отрицательным, а двигатель перейдёт в режим генерации (отрезок «генерирующая область»). В таком режиме ротор будет испытывать магнитное сопротивление, что приведёт к торможению мотора. Колебательный процесс будет повторяться, пока не стабилизируется крутящий момент, а скольжение не приблизится к номинальному значению.
Преимущества и недостатки
Повсеместное использование асинхронных двигателей с короткозамкнутыми роторами обусловлено их неоспоримыми преимуществами:
- стабильностью работы на оптимальных нагрузках;
- высокой надёжностью в эксплуатации;
- низкие эксплуатационные затраты;
- долговечностью функционирования без обслуживания;
- сравнительно высокими показателями КПД;
- невысокой стоимостью, по сравнению с моделями на основе фазных роторов и с другими типами электромоторов.
Из недостатков можно отметить:
- высокие пусковые токи;
- чувствительность к перепадам напряжений;
- низкие коэффициенты скольжений;
- необходимость в применении устройств, таких как преобразователи частоты, пусковые реостаты и др., для улучшения характеристик электромотора;
- ЭД с короткозамкнутым ротором нуждаются в дополнительных коммутационных управляющих устройствах, в случаях, когда возникает необходимость регулировать скорость.
Электродвигатели данного типа имеют приличную механическую характеристику. Несмотря на недостатки, они лидируют по показателям их применения.
Основные технические характеристики
В зависимости от класса электродвигателя, его технические характеристики меняются. В рамках данной статьи не ставится задача приведения параметров всех существующих классов двигателей. Мы остановимся на описании основных технических характеристик для электромоторов классов 56 А2 – 80 В2.
В этом небольшом промежутке на линейке моделей эелектромоторов с короткозамкнутыми роторами можно отметить следующее:
Мощность составляет от 0,18 кВт (класс 56 А2) до 2,2 кВт (класс 80 В2).
Ток при максимальном напряжении – от 0,55 А до 5А.
КПД от 66% до 83%.
Частота вращения вала для всех моделей из указанного промежутка составляет 3000 об./мин.
Технические характеристики конкретного двигателя указаны в его паспорте.
Подключение
Статорные обмотки трёхфазного АДКР можно подключать по схеме «треугольник» либо «звезда». При этом для звёздочки требуется напряжение выше, чем для треугольника.
Обратите внимание на то, что электродвигатель, подключенный разными способами к одной и той же сети, потребляет разную мощность. Поэтому нельзя подключать электромотор, рассчитанный на схему «звезда» по принципу треугольника. Но с целью уменьшения пусковых токов можно коммутировать на время пуска контакты звезды в треугольник, но тогда уменьшится и пусковой момент.
Схемы включения понятны из рисунка 4.

Рис. 4. Схемы подключения
Для подключения трёхфазного электрического двигателя к однофазному току применяют фазосдвигающие элементы: конденсаторы, резисторы. Примеры таких подключений смотрите на рисунке 5. Можно использовать как звезду, так и треугольник.
Рис. 5. Примеры схем подключений в однофазную сеть
С целью управления работой двигателя в электрическую цепь статора подключаются дополнительные устройства.