9. Назначение и структура механического привода
Назначение и структура механического привода. Основные характеристики привода. Назначение и классификация передач (передачи зацеплением и трением, зубчатые, червячные, а также волновые, ременные, цепные, фрикционные). Зубчатые передачи, их характеристика. Основные параметры зубчатых передач. Материалы и термообработка. Понятие о контактных напряжениях. Расчет контактных напряжений зубчатых передач. Критерии работоспособности. Расчет зубьев цилиндрических прямозубых передач на сопротивление усталости по изгибу. Расчетная модель и расчетные формулы. Расчет зубчатых цилиндрических передач на контактную выносливость. Определение расчетной нагрузки в зубчатых передачах. Коэффициенты концентрации нагрузки и динамичности нагрузки и их определение. Расчет допускаемых напряжений в зубчатых передачах.
10. Назначение и классификация механического привода
Механическая передача — механизм, служащий для передачи и преобразования механической энергии от энергетической машины до исполнительного механизма (органа) одного или более, как правило с изменением характера движения (изменения направления, сил, моментов и скоростей). Как правило, используется передача вращательного движения.
Классификация
Зубчатые (цилиндрические, конические, гипоидные, волновые, планетарные и т. п.);
Ременные (плоскоременные, клиноременные, круглоременные и т. п.);
Фрикционные (постоянной передачи, реверсы и вариаторы);
11.Кинематиеские и энергетические расчеты механических приводов.
Диапазон значений общего передаточного числа привода определяют по формуле:

Синхронную частоту вращения вала двигателя можно выбрать из диапазона полученных значений:

Выбрав синхронную частоту вращения вала двигателя и зная его стандартную мощность, по таблице 3 определяется типоразмер двигателя и коэффициент скольжения S.
Асинхронную (рабочую) частоту вращения вала двигателя определяют:
Уточненное передаточное число привода распределяется между механическими передачами, входящими в привод, по формуле:
Энергетический расчет позволяет выбрать асинхронный двигатель из серии 4А и определить его типоразмер по стандартной мощности и синхронной частоте вращения вала (nс=750, 1000, 1500, 3000 об/мин).
Расчет мощности двигателя начинается с расчета мощности рабочей машины.
Если рабочий вал исполнительной машины имеет поступательное движение и указаны тяговое усилие Ft , кН, и скорость V, м/с, то его мощность Ррм , кВт, вычисляется:
По мощности рабочей машины вычисляется требуемая расчетная мощность электродвигателя:
где ηприв общий коэффициент полезного действия (КПД) привода.
ηприв = η1 η2 η3… ηмnηппm , (3)
где η1 ,η2 ,η3 – КПД механических передач, входящих в привод;
n – число муфт в приводе;
ηпп – КПД пары подшипников;
m – число пар подшипников.
Частота вращения рабочего вала исполнительного механизма с поступательным движением при заданной его скорости определяется по формуле:
Привод (механич.)
По характеру распределения энергии различают групповой, индивидуальный и многодвигательный П. В групповом П. движение от одного двигателя передаётся группе рабочих машин или механизмов через одну или несколько трансмиссий . Вследствие технического несовершенства групповой П. почти полностью вытеснен индивидуальным П., в котором каждая рабочая машина имеет собственный двигатель с передачей. Такой П. позволяет работать при наиболее выгодной частоте вращения, производить быстрый пуск машины и торможение, осуществлять реверсирование . В многодвигательном П. отдельные рабочие органы машины приводятся в движение самостоятельным двигателем через свою систему передач. Такой П. позволяет получать компактную конструкцию машины, применять автоматическое управление; он используется в сложных металлорежущих станках, прокатных станах, подъёмно-транспортных машинах и др.
По назначению П. машин разделяют на стационарный, т. е. установленный неподвижно на раме или фундаменте; передвижной, используемый на движущихся рабочих машинах; транспортный, применяемый для различных транспортных средств. В качестве стационарного П. наиболее распространён электропривод , в котором источником механической энергии является электродвигатель; на передвижных рабочих и транспортных машинах используются главным образом тепловые двигатели с непосредственной механической или электрической передачей. В производстве применяются также гидропривод машин и пневматический П., в котором энергия вырабатываемого компрессором сжатого воздуха преобразуется в механическую энергию пневмодвигателями.
Развитие различных систем П. связано с созданием и совершенствованием двигателей. Уже первые паровые машины (Дж. Уатта , И. И. Ползунова и др.) потребовали применения передач и механизмов управления, которые в комплексе с паровым двигателем позволили получить экономичный, постоянно действующий источник механической энергии, не зависящий от природных условий. В процессе дальнейшего развития П. были созданы паровые и гидравлические турбины и двигатели внутреннего сгорания . С конца 19 — начала 20 вв. эти двигатели, объединённые с системами механических передач, стали основным типом П. транспортных и рабочих машин — автомобилей, самолётов, тракторов, экскаваторов и др. В начале 20 в. в П. машин производственного назначения широкое применение получили двигатели электрические (сначала постоянного тока, а затем трёхфазные асинхронные двигатели, имеющие высокий кпд, надёжные в эксплуатации, экономичные). Переход к обслуживанию машин (особенно станков, кузнечно-прессового и др. оборудования) индивидуальным и многодвигательным П. дал возможность располагать рабочие машины в необходимой последовательности и подготовить условия для развития в промышленности массового производства. Объединение электропривода с машиной-орудием позволило создать станки-автоматы, а затем автоматические системы машин (см. Автоматическая линия ) и перейти к управлению производством с помощью средств вычислительной техники. Электропривод получил также широкое применение в коммунальном и бытовом обслуживании (швейные, стиральные, кухонные машины, электробритвы и т.д.). В П. транспортных машин ведущая роль сохраняется за двигателями внутреннего сгорания (в автомобилях, тепловозах, теплоходах), газовыми турбинами (в самолётах, газотурбовозах), ядерными силовыми установками (на подводных лодках, ледоколах, военных кораблях). В начале 70-х гг. 20 в. около 80% суммарной мощности всех существующих двигателей приходилось на долю транспортных. Для обеспечения сложных по режиму условий работы используются комбинированные П., например паровые турбины устанавливаются совместно с тепловыми двигателями или газовыми турбинами, гидропривод комбинируется с электроприводом и т.д. (гидроэлектропривод, газотурбогидропривод и др.). Мощность П. определяется возможностями примененного в нём двигателя. Диапазон мощностей П. современных машин очень широк: от десятков Мвт (П. гребных винтов, мощных насосов, вентиляторов аэрогидродинамических труб) до долей вт (микропривод электрических часов).
Использование передаточных механизмов в П. машин обусловлено рядом конструктивно-эксплуатационных факторов: по условиям компоновки, габаритов, техники безопасности двигатель не всегда можно непосредственно соединить с исполнительным механизмом; требуемые скорости машины обычно не совпадают с оптимальной частотой вращения двигателя; в большинстве технологических и транспортных машин необходимо обеспечить регулирование скоростей и возможность работы с большими моментами при малых скоростях (регулирование же скорости двигателя не всегда возможно и экономично); двигатели предназначены главным образом для равномерного вращательного движения, а рабочие органы машин осуществляют часто поступательное, винтовое и др. виды движений, а также движение с заданным законом изменения скоростей и т.д. В П. машин передачи выполняют с постоянным или регулируемым передаточным отношением . Наиболее часто в П. используются: механизмы, сохраняющие постоянное передаточное отношение, — редукторы и мультипликаторы (соответственно понижающие и повышающие частоту вращения); коробки передач (скоростей), позволяющие ступенчато изменять частоту вращения; вариаторы , обеспечивающие бесступенчатое регулирование числа оборотов и оптимальный скоростной режим; различные открытые передачи (ремённые, цепные, зубчатые и др.). П. механизмов дистанционного управления и контроля (в автомобилях, тракторах, мотоциклах) осуществляется с помощью гибких валов . Кроме механических передач, в П. машин используются электрические, гидравлические и др. передачи. Применяется также т. н. встроенный привод, целиком смонтированный в рабочем органе машины (электробарабаны ленточных конвейеров и грузоподъёмных машин, приводные ролики роликовых конвейеров, мотор-колёса мощных автомобилей).
Аппаратура управления П. служит для пуска, остановки, изменения направления вращения, регулирования скорости, торможения, защиты двигателей и механизмов машин от перегрузок и повреждений, блокировки отдельных механизмов и т.д.
Системы управления П. могут быть ручными, полуавтоматическими и автоматическими. При ручной системе все операции управления осуществляются аппаратами, непосредственно воздействующими на силовую цепь двигателя (рубильники, контроллеры, реостаты и др.) или на систему его питания, зажигания и т.д. При полуавтоматическом управлении непосредственное воздействие оказывается на специальные командоаппараты (кнопки, педали, командо-контроллеры, путевые и конечные выключатели и др.). Контакты командоаппаратов включены в маломощные вспомогательные цепи реле и контакторов, которые, в свою очередь, переключают силовые цепи двигателей без непосредственного участия человека. При автоматическом управлении начальный импульс для включения П. посылается механическим или электрическим реле или иными аппаратами (датчиками). В дальнейшем автоматическая работа системы поддерживается и контролируется электрическими, механическими, гидравлическими или др. аппаратами (регуляторами, распределителями, фото- и термоэлементами, логическими, программными, телевизионными устройствами и т.д.).
Автоматизация управления П. позволяет осуществлять регулирование скорости при заданной программе в функции пути, времени или нагрузки, регулирование ускорения и замедления, перераспределение нагрузки между П., точную остановку или реверс всех или отдельных П., защиту от перегрузки, разноса, неправильного начального положения и т.п. Применение автоматизации (даже частичной) увеличивает надёжность и точность работы П., повышает производительность машин в целом, позволяет управлять П. на расстоянии. В ряде случаев автоматизация П. диктуется условиями безопасности труда (нежелательностью пребывания людей в токсичной или пыльной среде, при работе с радиоактивными материалами и т.п.). Автоматизация управления П. даёт возможность перейти от индивидуального управления рабочими машинами к автоматическому управлению производственными агрегатами участками, цехами (см. Автоматизация производства ) .
Большая советская энциклопедия. — М.: Советская энциклопедия . 1969—1978 .
Что такое привод в механике
Назначение и структура механического привода. Основные характеристики привода. Назначение и классификация передач (передачи зацеплением и трением, зубчатые, червячные, а также волновые, ременные, цепные, фрикционные). Зубчатые передачи, их характеристика. Основные параметры зубчатых передач. Материалы и термообработка. Понятие о контактных напряжениях. Расчет контактных напряжений зубчатых передач. Критерии работоспособности. Расчет зубьев цилиндрических прямозубых передач на сопротивление усталости по изгибу. Расчетная модель и расчетные формулы. Расчет зубчатых цилиндрических передач на контактную выносливость. Определение расчетной нагрузки в зубчатых передачах. Коэффициенты концентрации нагрузки и динамичности нагрузки и их определение. Расчет допускаемых напряжений в зубчатых передачах.
10. Назначение и классификация механического привода
Механическая передача — механизм, служащий для передачи и преобразования механической энергии от энергетической машины до исполнительного механизма (органа) одного или более, как правило с изменением характера движения (изменения направления, сил, моментов и скоростей). Как правило, используется передача вращательного движения.
Классификация
Зубчатые (цилиндрические, конические, гипоидные, волновые, планетарные и т. п.);
Ременные (плоскоременные, клиноременные, круглоременные и т. п.);
Фрикционные (постоянной передачи, реверсы и вариаторы);
11.Кинематиеские и энергетические расчеты механических приводов.
Диапазон значений общего передаточного числа привода определяют по формуле:
Синхронную частоту вращения вала двигателя можно выбрать из диапазона полученных значений:
Выбрав синхронную частоту вращения вала двигателя и зная его стандартную мощность, по таблице 3 определяется типоразмер двигателя и коэффициент скольжения S.
Асинхронную (рабочую) частоту вращения вала двигателя определяют:
Уточненное передаточное число привода распределяется между механическими передачами, входящими в привод, по формуле:
Энергетический расчет позволяет выбрать асинхронный двигатель из серии 4А и определить его типоразмер по стандартной мощности и синхронной частоте вращения вала (nс=750, 1000, 1500, 3000 об/мин).
Расчет мощности двигателя начинается с расчета мощности рабочей машины.
Если рабочий вал исполнительной машины имеет поступательное движение и указаны тяговое усилие Ft , кН, и скорость V, м/с, то его мощность Ррм , кВт, вычисляется:
По мощности рабочей машины вычисляется требуемая расчетная мощность электродвигателя:
где ηприв общий коэффициент полезного действия (КПД) привода.
ηприв = η1 η2 η3… ηмnηппm , (3)
где η1 ,η2 ,η3 – КПД механических передач, входящих в привод;
n – число муфт в приводе;
ηпп – КПД пары подшипников;
m – число пар подшипников.
Частота вращения рабочего вала исполнительного механизма с поступательным движением при заданной его скорости определяется по формуле:
Привод (механич.)
По характеру распределения энергии различают групповой, индивидуальный и многодвигательный П. В групповом П. движение от одного двигателя передаётся группе рабочих машин или механизмов через одну или несколько трансмиссий . Вследствие технического несовершенства групповой П. почти полностью вытеснен индивидуальным П., в котором каждая рабочая машина имеет собственный двигатель с передачей. Такой П. позволяет работать при наиболее выгодной частоте вращения, производить быстрый пуск машины и торможение, осуществлять реверсирование . В многодвигательном П. отдельные рабочие органы машины приводятся в движение самостоятельным двигателем через свою систему передач. Такой П. позволяет получать компактную конструкцию машины, применять автоматическое управление; он используется в сложных металлорежущих станках, прокатных станах, подъёмно-транспортных машинах и др.
По назначению П. машин разделяют на стационарный, т. е. установленный неподвижно на раме или фундаменте; передвижной, используемый на движущихся рабочих машинах; транспортный, применяемый для различных транспортных средств. В качестве стационарного П. наиболее распространён электропривод , в котором источником механической энергии является электродвигатель; на передвижных рабочих и транспортных машинах используются главным образом тепловые двигатели с непосредственной механической или электрической передачей. В производстве применяются также гидропривод машин и пневматический П., в котором энергия вырабатываемого компрессором сжатого воздуха преобразуется в механическую энергию пневмодвигателями.
Развитие различных систем П. связано с созданием и совершенствованием двигателей. Уже первые паровые машины (Дж. Уатта , И. И. Ползунова и др.) потребовали применения передач и механизмов управления, которые в комплексе с паровым двигателем позволили получить экономичный, постоянно действующий источник механической энергии, не зависящий от природных условий. В процессе дальнейшего развития П. были созданы паровые и гидравлические турбины и двигатели внутреннего сгорания . С конца 19 — начала 20 вв. эти двигатели, объединённые с системами механических передач, стали основным типом П. транспортных и рабочих машин — автомобилей, самолётов, тракторов, экскаваторов и др. В начале 20 в. в П. машин производственного назначения широкое применение получили двигатели электрические (сначала постоянного тока, а затем трёхфазные асинхронные двигатели, имеющие высокий кпд, надёжные в эксплуатации, экономичные). Переход к обслуживанию машин (особенно станков, кузнечно-прессового и др. оборудования) индивидуальным и многодвигательным П. дал возможность располагать рабочие машины в необходимой последовательности и подготовить условия для развития в промышленности массового производства. Объединение электропривода с машиной-орудием позволило создать станки-автоматы, а затем автоматические системы машин (см. Автоматическая линия ) и перейти к управлению производством с помощью средств вычислительной техники. Электропривод получил также широкое применение в коммунальном и бытовом обслуживании (швейные, стиральные, кухонные машины, электробритвы и т.д.). В П. транспортных машин ведущая роль сохраняется за двигателями внутреннего сгорания (в автомобилях, тепловозах, теплоходах), газовыми турбинами (в самолётах, газотурбовозах), ядерными силовыми установками (на подводных лодках, ледоколах, военных кораблях). В начале 70-х гг. 20 в. около 80% суммарной мощности всех существующих двигателей приходилось на долю транспортных. Для обеспечения сложных по режиму условий работы используются комбинированные П., например паровые турбины устанавливаются совместно с тепловыми двигателями или газовыми турбинами, гидропривод комбинируется с электроприводом и т.д. (гидроэлектропривод, газотурбогидропривод и др.). Мощность П. определяется возможностями примененного в нём двигателя. Диапазон мощностей П. современных машин очень широк: от десятков Мвт (П. гребных винтов, мощных насосов, вентиляторов аэрогидродинамических труб) до долей вт (микропривод электрических часов).
Использование передаточных механизмов в П. машин обусловлено рядом конструктивно-эксплуатационных факторов: по условиям компоновки, габаритов, техники безопасности двигатель не всегда можно непосредственно соединить с исполнительным механизмом; требуемые скорости машины обычно не совпадают с оптимальной частотой вращения двигателя; в большинстве технологических и транспортных машин необходимо обеспечить регулирование скоростей и возможность работы с большими моментами при малых скоростях (регулирование же скорости двигателя не всегда возможно и экономично); двигатели предназначены главным образом для равномерного вращательного движения, а рабочие органы машин осуществляют часто поступательное, винтовое и др. виды движений, а также движение с заданным законом изменения скоростей и т.д. В П. машин передачи выполняют с постоянным или регулируемым передаточным отношением . Наиболее часто в П. используются: механизмы, сохраняющие постоянное передаточное отношение, — редукторы и мультипликаторы (соответственно понижающие и повышающие частоту вращения); коробки передач (скоростей), позволяющие ступенчато изменять частоту вращения; вариаторы , обеспечивающие бесступенчатое регулирование числа оборотов и оптимальный скоростной режим; различные открытые передачи (ремённые, цепные, зубчатые и др.). П. механизмов дистанционного управления и контроля (в автомобилях, тракторах, мотоциклах) осуществляется с помощью гибких валов . Кроме механических передач, в П. машин используются электрические, гидравлические и др. передачи. Применяется также т. н. встроенный привод, целиком смонтированный в рабочем органе машины (электробарабаны ленточных конвейеров и грузоподъёмных машин, приводные ролики роликовых конвейеров, мотор-колёса мощных автомобилей).
Аппаратура управления П. служит для пуска, остановки, изменения направления вращения, регулирования скорости, торможения, защиты двигателей и механизмов машин от перегрузок и повреждений, блокировки отдельных механизмов и т.д.
Системы управления П. могут быть ручными, полуавтоматическими и автоматическими. При ручной системе все операции управления осуществляются аппаратами, непосредственно воздействующими на силовую цепь двигателя (рубильники, контроллеры, реостаты и др.) или на систему его питания, зажигания и т.д. При полуавтоматическом управлении непосредственное воздействие оказывается на специальные командоаппараты (кнопки, педали, командо-контроллеры, путевые и конечные выключатели и др.). Контакты командоаппаратов включены в маломощные вспомогательные цепи реле и контакторов, которые, в свою очередь, переключают силовые цепи двигателей без непосредственного участия человека. При автоматическом управлении начальный импульс для включения П. посылается механическим или электрическим реле или иными аппаратами (датчиками). В дальнейшем автоматическая работа системы поддерживается и контролируется электрическими, механическими, гидравлическими или др. аппаратами (регуляторами, распределителями, фото- и термоэлементами, логическими, программными, телевизионными устройствами и т.д.).
Автоматизация управления П. позволяет осуществлять регулирование скорости при заданной программе в функции пути, времени или нагрузки, регулирование ускорения и замедления, перераспределение нагрузки между П., точную остановку или реверс всех или отдельных П., защиту от перегрузки, разноса, неправильного начального положения и т.п. Применение автоматизации (даже частичной) увеличивает надёжность и точность работы П., повышает производительность машин в целом, позволяет управлять П. на расстоянии. В ряде случаев автоматизация П. диктуется условиями безопасности труда (нежелательностью пребывания людей в токсичной или пыльной среде, при работе с радиоактивными материалами и т.п.). Автоматизация управления П. даёт возможность перейти от индивидуального управления рабочими машинами к автоматическому управлению производственными агрегатами участками, цехами (см. Автоматизация производства ) .
Большая советская энциклопедия. — М.: Советская энциклопедия . 1969—1978 .
Привод
При́вод (он же силовой привод) — совокупность устройств, предназначенных для приведения в действие машин и механизмов. Является тем, что выполняет работу по превращению одного типа энергии в другой и передаёт эту энергию исполнительному механизму. То, что приводит исполнительный механизм в движение, представляет собой своего рода «вставку» между приводным двигателем и нагрузкой (машиной или механизмом, движителем) и выполняет те же функции, что и механическая передача. Подсистемы привода: система управления, двигатель, трансмиссия. Различают привод групповой (для нескольких машин) и индивидуальный.Электрический привод
* Электрический привод арматуры
* Мускульный привод — приводимый в действие мускульной силой (велосипед, веломобиль, мускулолёт, гребное судно и пр.)
Двигательная установка космического аппаратаАвтомобилестроение:
Гибридный синергетический приводТакже:
Линейный приводВ компьютерах
* Привод гибких дисков — электромеханическое устройство для считывания/записи информации на дискетах
Оптический привод — электромеханическое устройство для считывания/записи информации с оптических носителей.В юриспруденции:
Приво́д — принудительное доставление лица к дознавателю, следователю, прокурору или в суд в случае неявки по их вызову без уважительных причин.В спорте:
Привод (жарг.) — страйкбольное (и пейнтбольное) стрелковое пневматическое оружие, стреляющее пластиковыми шарами диаметром 6 мм или 8 мм и массой от 0,12 до 0,43 гр. Страйкбольное оружие максимально похожее по внешнему виду, массе и размером на реальные образцы стрелкового оружия.В коневодстве:
Связанные понятия
Упоминания в литературе
Связанные понятия (продолжение)
Поскольку на современных летательных аппаратах имеется большое количество разнообразных исполнительных механизмов и агрегатов, то в качестве источников механической энергии применяются гидравлические, пневматические и электрические приводы. Наиболее универсальным из них считается электрический привод благодаря высокой надёжности, простоте в эксплуатации и возможности автоматизации. По виду преобразования энергии различают электродвигательный привод и электромагнитный.
Бензи́новые электроста́нции — компактные автономные силовые установки для производства электрической энергии. Используются в качестве основного или резервного источника электроснабжения. Виды генераторов.
Типы приводов и их механизмы
Совокупность устройств, приводящих в движение рабочие органы металлорежущих станков, называют приводом. Он состоит из двигателя, являющегося источником движения, и механизмов, передающих движение рабочим органам и трансформирующих его. Передаточный механизм часто служит для увеличения крутящего момента (или усилия) и уменьшения скорости, т. к. широко применяемые электродвигатели имеют частоту вращения 3000, 1500, 1000, 750 и 600 об./мин при сравнительно небольшом крутящем моменте. В большинстве случаев скорости нужны меньшие, а моменты бóльшие, что достигается установкой за двигателем редуктора. Если же необходимо иметь несколько скоростей рабочего органа машины, то за двигателем следует коробка передач (скоростей). Привод также может содержать муфты для соединения валов (например, электродвигателя и редуктора), устройства, предохраняющие от перегрузки, изменяющие направление движения, преобразующие один вид движения в другой (например, вращательное в поступательное), блокировочные и др. (см. далее). Наиболее распространены электрический, гидравлический и пневматический приводы, причем последние два получают энергию от электродвигателя.
1. Электропривод
В качестве двигателей электропривода чаще всего применяют односкоростные асинхронные электродвигатели переменного тока с короткозамкнутым ротором. Асинхронная машина включается в трехфазную сеть, поэтому она должна иметь на статоре три фазные обмотки, создающие вращающееся магнитное поле, которое увлекает за собой ротор. Ротор вращается асинхронно, т. е. со скоростью, отличной от скорости поля. Обладая жесткой характеристикой (зависимостью крутящего момента от числа оборотов), эти двигатели обеспечивают постоянство мощности во всем диапазоне скоростей и незначительное изменение числа оборотов вала под нагрузкой.
Применение асинхронных электродвигателей с электрическим переключением скоростей путем изменения числа пар полюсов значительно упрощает коробки передач. Однако асинхронные электродвигатели с переключением скоростей обладают постоянным моментом на разных скоростях, что снижает их эффективность при малых оборотах.
Характерной частью большой группы электрических машин является коллектор — полый цилиндр, собранный из изолированных друг от друга медных колец. Наличие коллектора у машин переменного тока позволяет подвести фазы к ротору. Асинхронные электродвигатели с фазным ротором применяются для механизмов с плавным, ступенчатым пуском в тяжелых условиях при продолжительном режиме работы.
Использование электродвигателей постоянного тока, частоту вращения которых в достаточно широких пределах можно регулировать (при постоянной мощности в определенном диапазоне скоростей) изменяя поле возбуждения, оказывается более предпочтительным, т. к. значительно упрощает коробку передач.
В двигателях постоянного тока коллектор обеспечивает постоянный по направлению вращающий момент. Область применения коллекторных машин, в особенности машин постоянного тока, достаточно обширна, а наличие простых и малогабаритных выпрямительных устройств позволяет подключать их к сетям переменного тока. Особенно ценное свойство коллекторной машины постоянного тока — возможность плавного (бесступенчатого) регулирования частоты вращения ротора.
Синхронной называется электрическая машина, скорость вращения ротора которой связана постоянным отношением с частотой сети переменного тока, в которую эта машина включена. Синхронные электродвигатели целесообразны в тех случаях, когда необходим двигатель, работающий при постоянной скорости. У синхронных двигателей КПД несколько выше, а масса на единицу мощности ниже, чем у асинхронных двигателей, рассчитанных на ту же частоту вращения.
Для осуществления вспомогательных движений нередко используют электромагниты.
2. Гидропривод
Гидравлические приводы основаны на энергии давления жидкости. Их подразделяют на объемные и гидродинамические. В гидродинамическом приводе используется кинетическая энергия жидкости, в объемном — потенциальная энергия, преобразуемая в механическую работу. Объемный гидропривод обеспечивает большие передаточные отношения, силы и крутящие моменты, обладает высокой компактностью и энергоемкостью, удобен в управлении, позволяет реализовать любые циклы работы исполнительных органов машин.
Объемным гидроприводом называется совокупность одной или нескольких объемных гидропередач, гидроаппаратуры и вспомогательных гидроустройств.
Достоинства объемного гидропривода:
- Высокая энергонапряженность. Современные насосы создают давление до 40– 70 МПа (т. е. до 700 кг/см 2 ). Поэтому гидропривод имеет меньшие по сравнению с электроприводом массу и габариты и применяется для привода машин, развивающих большие усилия (гидравлические прессы, экскаваторы, металлорежущие станки и др.).
- Малая инерционность сокращает рабочий цикл и повышает производительность станка.
- Бесступенчатое регулирование скорости рабочих движений упрощает конструкцию привода и повышает коэффициент использования приводного двигателя.
- Преобразование без дополнительных устройств вращательного движения ведущего звена в поступательное движение ведомого звена.
- Надежность в работе благодаря отсутствию заклинивания за счет применения предохранительных клапанов.
- Применение стандартизованных и унифицированных покупных узлов снижает стоимость привода и упрощает его эксплуатацию и ремонт.
- Возможность автоматизации.
- Самосмазываемость. Недостатки гидропривода:
- Зависимость характеристики привода от вязкости рабочей жидкости, которая связана с изменением температуры.
- Растворимость в рабочей жидкости воздуха, который нарушает работу привода, особенно в автоматических устройствах.
- Внутренние и наружные утечки рабочей жидкости.
Гидросхема станка, обеспечивающая возвратно-поступательное движение стола 9, поршня 10 и его остановку в любом положении, показана на рис. 1. Электродвигатель 2 приводит во вращение насос 4, засасывающий масло из бака 1 по трубе 15 и подающий его под давлением через фильтр 6 и распределитель 7 в левую полость цилиндра 8. Из правой полости цилиндра масло через распределитель 7, дроссель 11 и трубопровод 13 попадает в бак.
Давление в гидросистеме настраивают предохранительным клапаном 3 и контролируют манометром 5. Если давление жидкости в клапане 3 преодолеет усилие его пружины, то жидкость будет проходить через клапан в бак. Если переключить распределитель 7, то масло, подаваемое насосом 4, будет через фильтр и распределитель поступать в правую полость цилиндра 8 и одновременно его левая полость соединится с баком. При этом направление движения стола 9 изменяется. Для остановки стола необходимо повернуть кран 12, в результате чего рабочая жидкость будет свободно сливаться в бак через трубу 14, и давление в гидросистеме уменьшится. Дроссель 11 позволяет изменять количество жидкости, проходящей из гидроцилиндра в единицу времени, и, следовательно, скорость движения стола.
Вместо гидропривода поступательного движения можно получить гидропривод вращательного движения, заменив гидроцилиндр 8 гидромотором.
Главный элемент гидропривода — ансос . Шестеренные насосы изготавливают нерегулируемыми и применяют в тех случаях, когда требуется сравнительно низкое давление масла (16–20 МПа). Шестеренный насос (рис. 2) состоит из ведущего 3 и ведомого 4 зубчатых колес, расположенных в корпусе. При вращении зубчатых колес масло в зону всасывания 1 засасывается сначала образующимся там вакуумом, а затем впадинами зубьев и переносится в зону нагнетания 2. Дальше масло поступает в гидросеть.
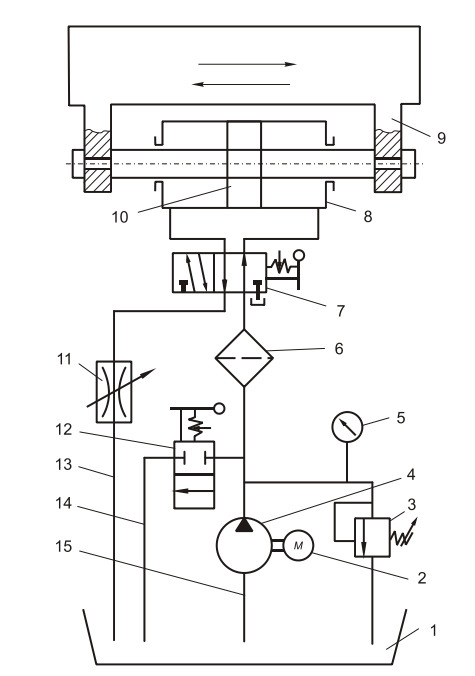
Рис. 1. Гидросхема станка
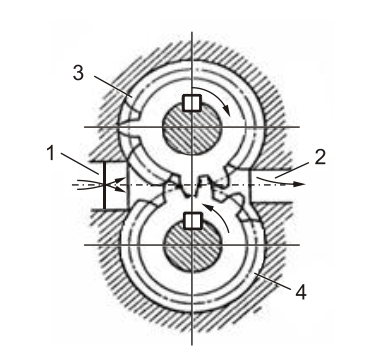
Рис. 2. Шестеренный насос
Пластинчатые насосы. Преимущественно пpимeняются нерегулируемые пластинчатые насосы, (давление до 32 МПа) которые просты по конструкции, компактны, отличаются равномерностью подачи масла и относительно высоким КПД. Пластинчатые насосы выпускают одно- и двухпоточными (с двумя независимыми потоками). В последних на общем приводном валу установлены два рабочих комплекта (одинаковых или различных), что обеспечивает возможность нагнетания масла двумя независимыми потоками.
Основные детали насосов: корпус, приводной вал с подшипниками и рабочий комплект (рис. 3), состоящий из распределительных дисков, статора 1, ротора 2 и пластин 3.
При вращении ротора 2, связанного через шлицевые соединения 4 с приводным валом, в направлении против часовой стрелки, пластины 3 центробежной силой и давлением масла, прижимаются к внутренней поверхности статора 1, имеющей форму овала, и, следовательно, совершают возвратно-поступательное движение в пазах ротора. Во время движения пластин от точки А до точки В и от точки С до точки D объем камер, образованных двумя соседними пластинами, внутренней поверхностью статора, наружной поверхностью ротора и торцовыми поверхностями дисков, увеличивается, и масло заполняет рабочие камеры через окна диска, связанные со всасывающей линией. При движении пластин на участках ВС и DA объем камер уменьшается, и масло вытесняется в напорную линию гидросистемы.
Рассмотрим принципиальную схему радиально-поршневых насосов (рис. 4), развивающих давление до 70 МПа.
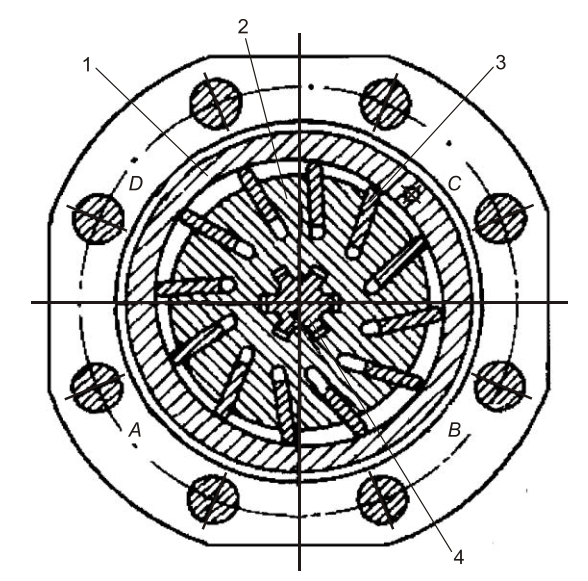
Рис. 3. Пластинчатый насос
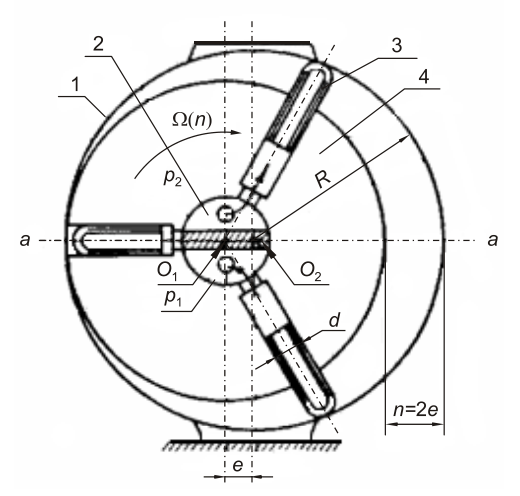
Рис. 4. Радиально-поршневой насос
Ротор 4 с радиально расположенными в нем поршнями 3 вращается внутри обоймы 1. Ось ротора смещена относительно оси обоймы на величину эксцентриситета е.
При вращении электродвигателем блока цилиндров 4 поршни 3, прижимаясь центробежными силами к обойме 1, совершают вращательное движение вокруг центра О1 и возвратно-поступательное движение в радиальном направлении. За один оборот каждый поршень совершает два хода по цилиндру: один рабочий (нагнетающий) и второй — нерабочий (всасывающий).
Поршни, соединенные с подводящей магистралью, засасывают жидкость из камеры Р2, поршни, соединенные с отводящей магистралью, нагнетают жидкость в рабочую камеру Р1. Камеры нагнетания и всасывания разделены перегородкой, ось которой совпадает с нейтральной осью насоса аа.
Производительность насоса зависит от величины эксцентриситета е. В регулируемых насосах эксцентриситет можно изменять как по величине, так и по знаку смещением обоймы 1 в направляющих. Смена знака эксцентриситета (смещение точки О2 влево от точки О1) вызовет изменение направления подачи насоса, при этом камеры нагнетания и всасывания поменяются местами.
Схемы аксиально-поршневых насосов (давление до 50 МПа) приведены на рис. 5. При вращении ротора 4 от вала 1 поршень 3 (рис. 5, а), взаимодействующий с неподвижной наклонной шайбой 2, совершает возвратно-поступательное движение. В установленном в корпусе насоса опорно-распределительном диске 5 имеются две полукольцевые канавки, расположенные таким образом, что полости под входящими в ротор поршнями соединены с напорной магистралью через канавку 7, а полости под выходящими из ротора поршнями — с всасывающей магистралью через канавку 6.
В некоторых конструкциях поршни 3 (рис. 5, б) связаны с шайбой 2 через специальные шарниры. Это обеспечивает всасывание масла при вращении вала с шайбой 2. При изменении угла наклона цилиндрового блока 4 вместе с опорно-распределительным диском 5 изменяется величина хода поршней и, следовательно, производительность насоса.
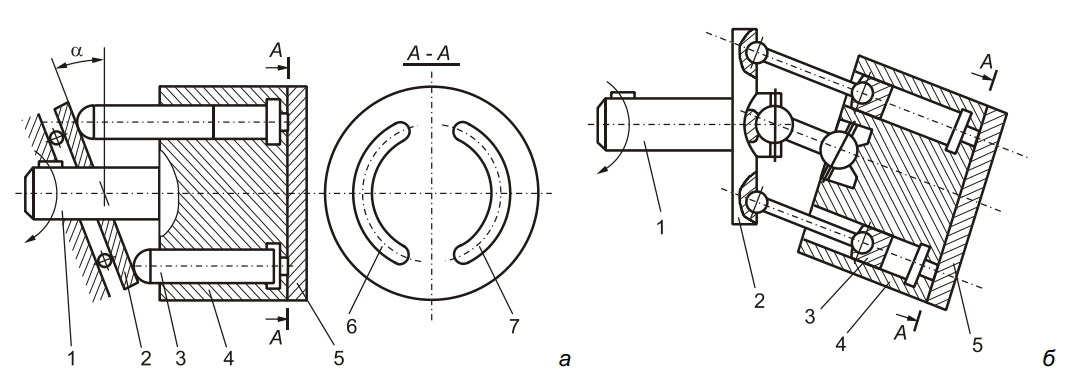
Рис. 5. Схемы аксиально-поршневых насосов: а — с наклонной шайбой; б — с наклонным блоком
Благодаря сферическому контакту поршней обеспечивается возможность передачи больших нагрузок на шайбу 2 и, следовательно, насос может развивать большое давление (около 40 МПа).
Поворотными гидродвигателями называют объемные гидродвигатели с ограниченным углом поворота выходного вала (рис. 6). Для осуществления поворотного движения рабочую жидкость (масло или эмульсию) попеременно подают в рабочие полости гидродвигателя.
Если рабочий орган машины должен совершать поступательное движение, то исполнительным механизмом будет гидравлический цилиндр (рис. 7).
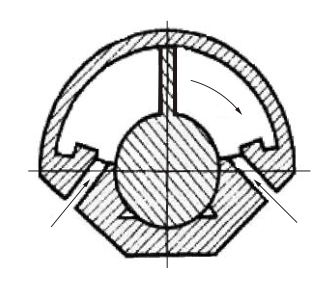
Рис. 6. Поворотный гидродвигатель

Рис. 7. Гидравлический цилиндр
Гидроцилиндр изготовлен из бесшовной стальной трубы 1, на концах которой в наружных проточках вставлены полукольца 6. На эти полукольца опираются лапы 7, к которым болтами крепят головки 5 и 8. Головка 5 имеет отверстие, через которое проходит шток 3, уплотняемый сальником и фланцем 4. С обеих сторон поршня есть тормозные плунжеры 2 и 11, которые в конце хода поршня входят в выточки а и б в головках 5 и 8, создающие гидравлический буфер. Конические поверхности на концах плунжеров служат для гашения гидравлического удара при входе плунжера в выточку. Рабочая жидкость в начальном положении поршня (когда отверстие в головке закрыто плунжером) поступает в полость цилиндра через обратный клапан 10, а в конце хода поршня сливается через дроссель 9.
Гидроаппаратура обеспечивает надежную работу и управление гидроприводом. Фильтры очищают масло от твердых частиц. Предохранительные клапаны не позволяют давлению масла превысить установленное значение, предохраняют систему от перегрузки. Дроссели служат для регулирования скорости движения рабочего органа путем изменения площади канала. Изменять скорость можно также, применяя регулируемые насосы и гидродвигатели. Распределители предназначены для изменения направления движения и остановки рабочего органа. Обратные клапаны не позволяют потоку жидкости двигаться в обратном направлении. К числу дополнительных устройств относятся регуляторы расхода, давления, температуры, а также реле давления, уровня жидкости, температуры. Заводы изготавливают также комплектные насосные станции, содержащие электродвигатель, насос, фильтр, предохранительный клапан и др., смонтированные на баке.
3. Пневматический привод
Пневмопривод использует энергию сжатого воздуха. На машиностроительных заводах имеется сеть трубопроводов сжатого воздуха давлением 0,4–0,6 МПа, создаваемого компрессорами, приводимыми в действие электродвигателями.
Основные преимущества пневматических приводов:
- надежность;
- быстродействие;
- простота конструкции;
- экономичность;
- дешевизна энергоносителя (воздуха);
- возможность бесступенчатого регулирования скорости исполнительных органов привода в широких пределах;
- безопасность в пожарном отношении.
Главный недостаток пневмопривода на машиностроительных заводах — низкое (в 100 раз меньше, чем у гидропривода) давление, не позволяющее получать больших усилий. Однако пневмоприводы имеют и ряд других недостатков, связанных в основном с высокой сжимаемостью воздуха. Энергия сжатого воздуха, преобразуемая в кинетическую энергию движущихся масс, вызывает рывки и удары, снижающие точность позиционирования выходных звеньев исполнительных органов станка. Поэтому пневмоприводы не обеспечивают необходимой плавности и точности хода, а также получения при переменной нагрузке равномерной и стабильной скорости перемещения исполнительных органов станков. Пневмоприводы, как правило, имеют более низкий (по сравнению с гидроприводом) КПД, а также требуют применения смазывающих устройств.
Исполнительными механизмами (почти как и в гидроприводе) являются пневмоцилиндры и мембранные исполнительные механизмы-пневмокамеры (для поступательного движения, рис. 8), пневмомоторы (для вращательного движения, рис. 9) и поворотные исполнительные механизмы (поворот на угол менее 360°, рис. 10).
Пневмокамеры срабатывают при подаче сжатого воздуха в отверстие К1/4″. Поршень, уплотненный резиновой диафрагмой движется вверх, увлекая за собой тягу d; после сброса давления пружина возвращает поршень вниз. Остальные пневмоприводы действуют подобно аналогичным гидравлическим. В качестве пневмомоторов применяют пластинчатые, поршневые и реже шестеренные, центробежные и другие машины.
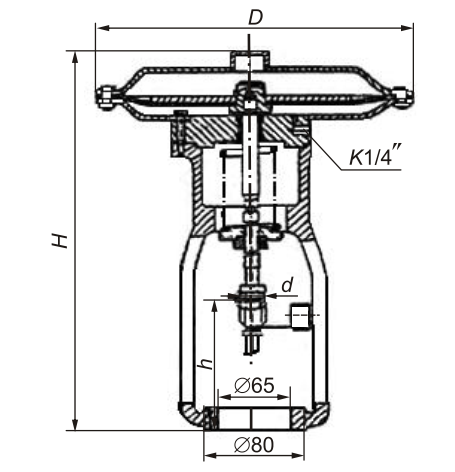
Рис. 8. Пневмокамера
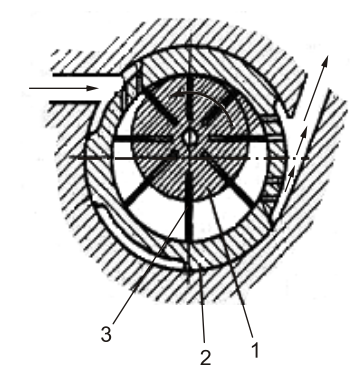
Рис. 9. Схема пластинчатого пневмомотора: 1 — ротор; 2 — статор; 3 — пластина
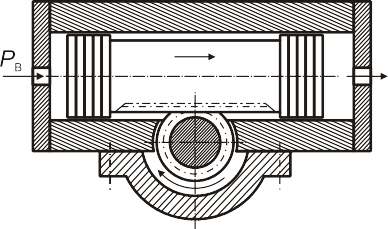
Рис. 10. Поворотный пневмоцилиндр (Рв — давление воздуха)
Промышленность выпускает следующую пневмоаппаратуру: фильтры, влагоотделители, предохранительные клапаны, дроссели, распределители, обратные и редукционные клапаны, регуляторы и реле давления. Заводы изготавливают также устройства очистки сжатого воздуха, глушители и др.
В цехах пневмопривод используется в приспособлениях для зажима заготовок совместно с усиливающими рычажными, винтовыми и клиновыми механизмами, а также для привода манипуляторов.
С помощью пневматических устройств решают сложные задачи автоматизации и управления станками.
Пневматические приводы загружают заготовки, включают и выключают рабочие движения режущего инструмента, тормозят рабочие органы станка при их остановке, освобождают и удаляют заготовки со станка, служат в качестве аэростатических опор и направляющих, а также выполняют другие функции. При применении сдвоенных (тандемы) и строенных пневмоцилиндров их общего усилия может быть достаточно и для решения технологических задач.
Пневмогидравлический привод позволяет получить бóльшие усилия, чем пневматический. Воздух действует на поршень большого диаметра, который плунжером малого диаметра вытесняет масло под более высоким давлением, поступающее в гидроцилиндр.
4. Механизмы приводов
Передающие механизмы (или передачи) передают движение от одного элемента привода к другому. Применяют ременные, цепные, зубчатые и червячные передачи. В них различают ведущий элемент (передающий движение) и ведомый элемент (получающий движение). Характеристикой передачи служит передаточное число, с помощью которого можно определить, во сколько раз частота вращения ведомого элемента меньше частоты вращения ведущего.
Ременная передача (рис. 11, а и 12, а) состоит из ведущего 1 и ведомого 2 шкивов и плоского (рис. 12, б), круглого (рис. 12, в) или клинового (рис. 12, г) ремня 3. Ее передаточное число u = ω1/ω2 = d2/d1(1–ε), где d1, d2 — диаметры ведущего и ведомого шкивов, мм; ε = 0,96…0,9 — коэффициент, учитывающий проскальзывание ремня относительно поверхностей шкивов.
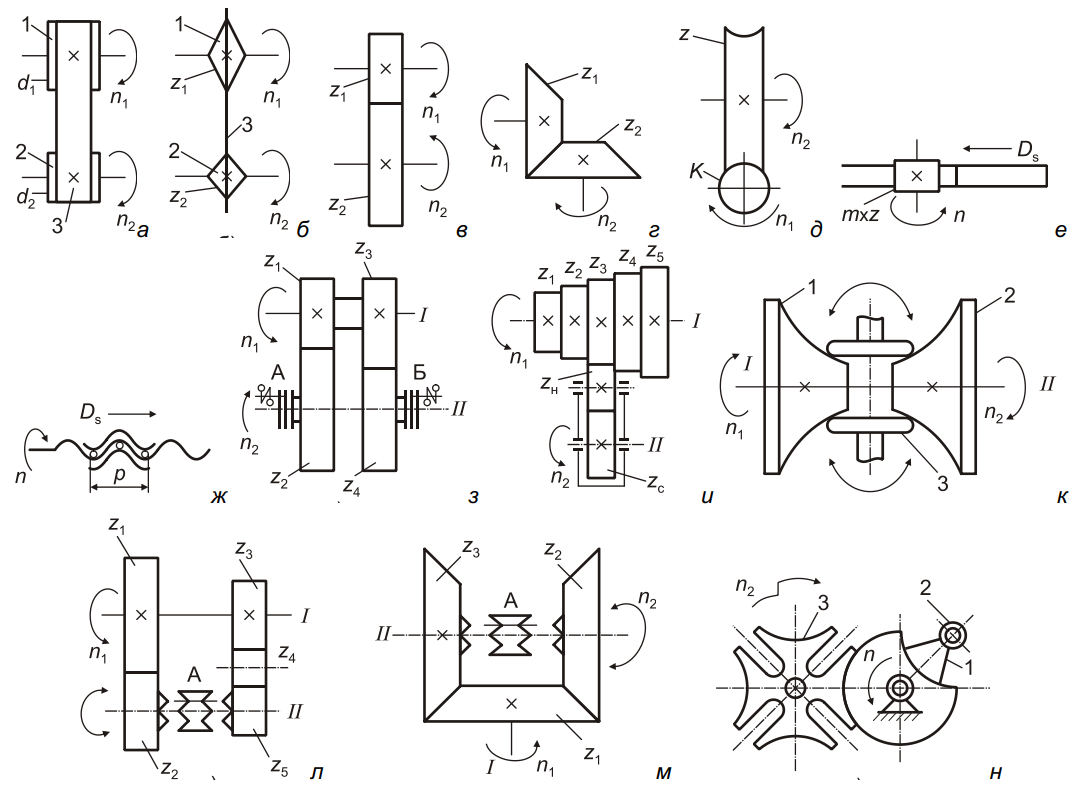
Рис. 11. Схематическое изображение передач: а — ременная; б — цепная; в — зубчатая цилиндрическая; г — коническая; д — червячная; е — реечная; ж — «винтгайка»; з–к — механизмы для изменения скорости; л, м — механизмы для изменения направления; н — механизм для осуществления периодических движений
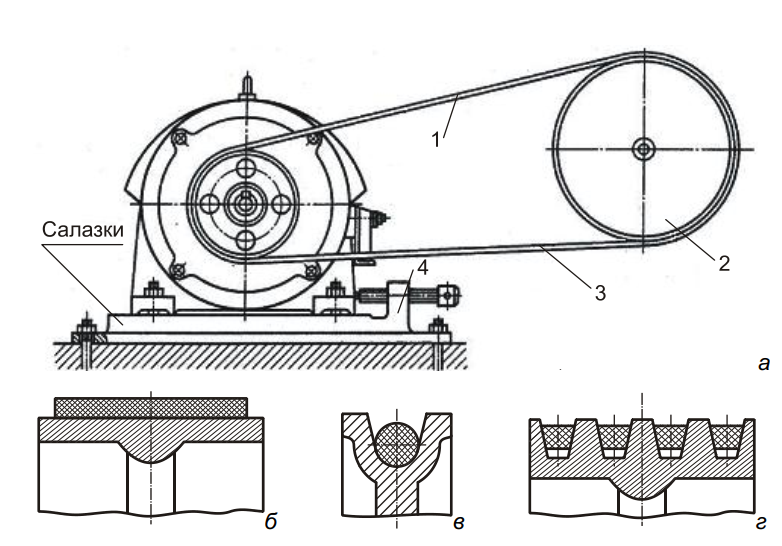
Рис. 12. Схемы ременной передачи (а) и сечения ремней (б–г)
Там, где проскальзывание нежелательно, применяют зубчатые ремни 3 (рис. 13) и зубчатые шкивы 1 и 2.
Фрикционной передачей называют механизм, в котором движение одного жесткого звена преобразуется в движение другого жесткого звена за счет сил трения в одной или нескольких зонах контакта (сопряжения). Необходимую силу трения между звеньями механизма обеспечивает прижатие одного из них к другому, т. е. силовое замыкание. Такие механизмы применяют преимущественно для преобразования параметров вращательного движения.
На рис. 14 показан лобовой вариатор, в котором ведущий каток 1 может перемещаться по своему валу (вдоль оси) в осевом направлении (как показано стрелками). Передаточное отношение этого вариатора будет непрерывно (бесступенчато) изменятьcя по мере изменения радиуса R. Если каток 1 находится на «оси» катка 2, то последний неподвижен. При переводе катка 1 в левую часть катка 2 поменяется направление вращения ведомого вала (реверсивное вращение). Имеется много других типов вариаторов (схема одного из них приведена на рис. 11, к).
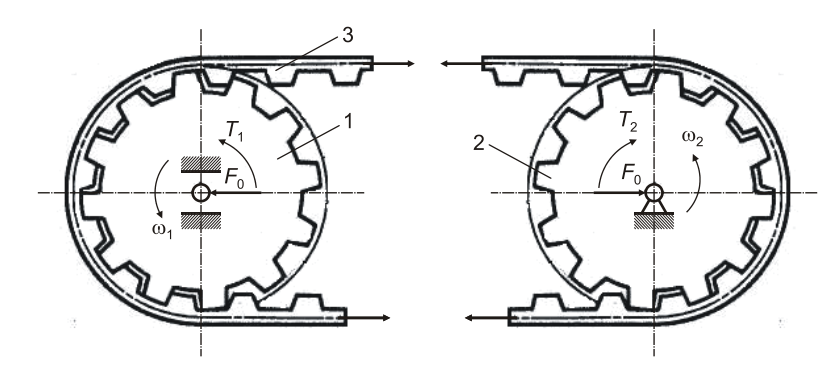
Рис. 13. Схема зубчато-ременной передачи
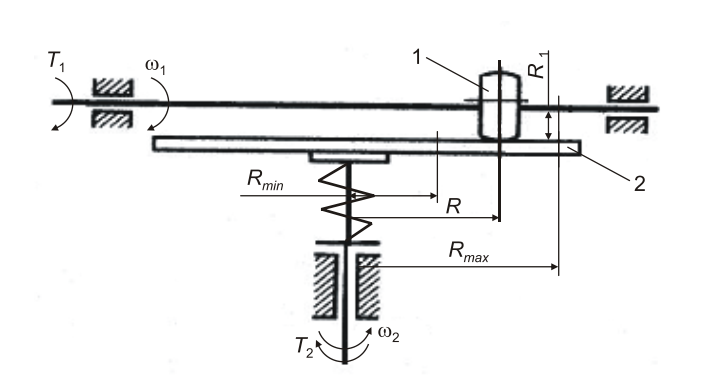
Рис. 14. Вариатор
Цепная передача (рис. 15 и 11, б) включает ведущую 1 и ведомую 2 звездочки и цепь. Проскальзывание здесь отсутствует.
Зубчатая передача осуществляется цилиндрическими (рис. 16, а и 11, в) или коническими (рис. 17, а и 11, г) зубчатыми колесами.
Передаточное число цепной и зубчатой передач u = Z2/Z1, где Z1 и Z2 — числа зубьев ведущего и ведомого элементов соответствующих передач. Для цилиндрических передач рекомендуется u = 2–7. Если ведущее колесо меньше ведомого, то угловая скорость ω уменьшается, а крутящий момент М = ηР/ω растет.
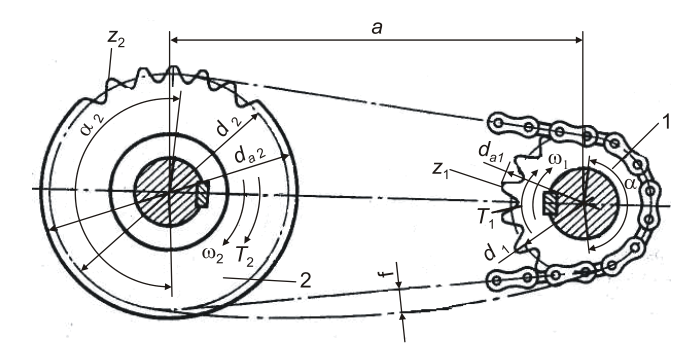
Рис. 15. Схема цепной передачи
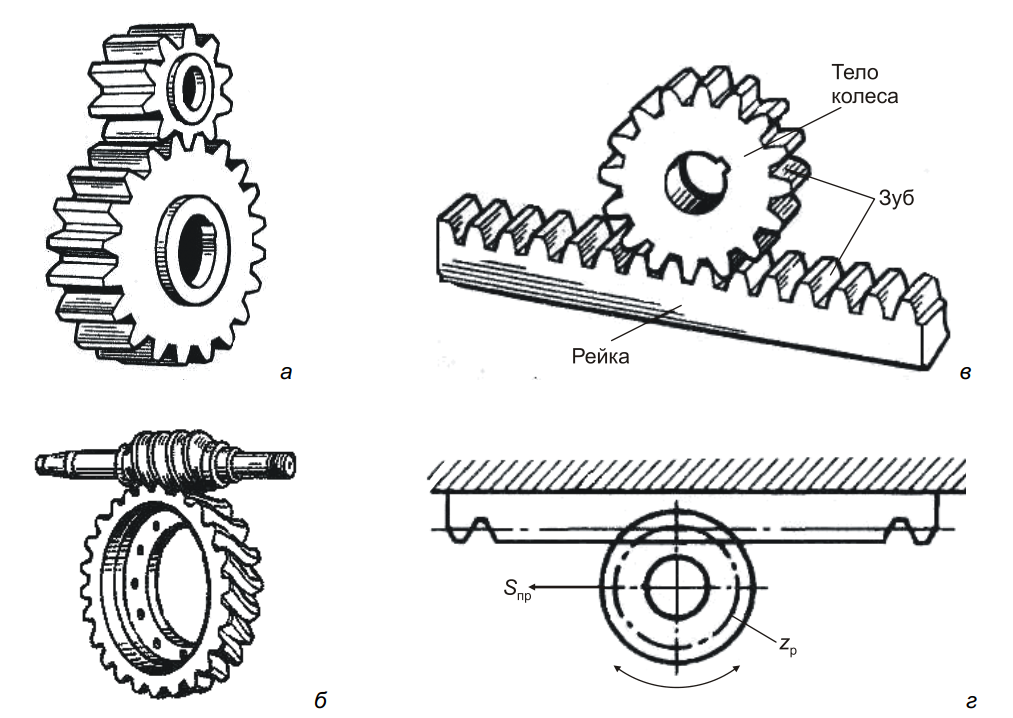
Рис. 16. Прямозубые цилиндрическая зубчатая (а, б) и реечная передачи (в, г)
Здесь η = 0,97 — КПД цилиндрической передачи. Он очень высок, т. к. зубья перекатываются друг по другу с небольшим проскальзыванием. Имеются также винтовые (рис. 17, в) передачи и передачи внутреннего зацепления (рис. 17, г).
Червячная передача (рис. 17, б) состоит из ведущего червяка (он сверху), имеющего k заходов, и ведомого червячного колеса с Z зубьями. Ее передаточное число u = Z/k. Червячная передача позволяет получать большие передаточные числа. Если Z = 40, а k = 1, то u = 40 (для цилиндрической передачи u = 2–7).
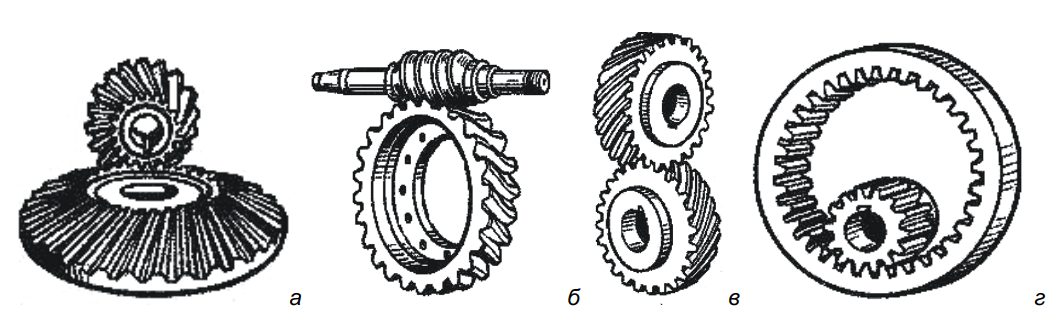
Рис. 17. Зубчатые передачи: а — коническая; б — червячная; в — винтовая; г — цилиндрическая с внутренним зацеплением
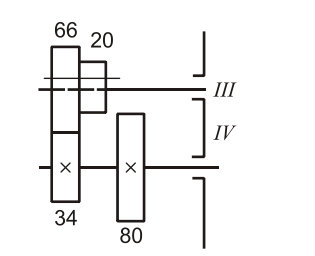
Рис. 18. Фрагмент коробки скоростей
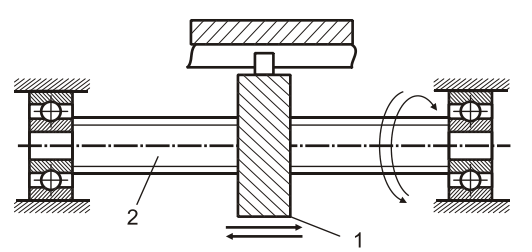
Рис. 19. Передача «винт-гайка»
Но Z можно взять еще больше. Низкий КПД червячной передачи (η = 0,65–0,8) является следствием трения скольжения между витками червяка и зубьями колеса.
Скорость вращения можно изменять пересцеплением зубчатых колес в коробке скоростей (рис. 18). Здесь цифры указывают на число зубьев у колес. Кресты означают неподвижное закрепление колес 34 и 80 на валу V. Горизонтальная тонкая линия, параллельная валу , означает, что блок колес 66–20 может перемещаться вдоль вала . В изображенном положении передаточное число с вала на V равно 66/34 и вал V будет вращаться почти в два раза быстрей, чем вал . Переместим блок вправо до сцепления колес 20 и 80. Теперь передаточное число равно 80/20 и вал V будет вращаться в четыре раза медленней, чем вал . Если валов в коробке скоростей 4 и на каждом имеется по двойному блоку, то число скоростей будет равно 2 · 2 · 2 · 2 = 16, а ведь блоки бывают и тройными. У автоматов зубчатые колеса сцеплены в нужных сочетаниях, но вращаются на валах свободно и сцепляются с валами сцепными муфтами (рис. 11, з). В коробках подач станков скорости можно менять с помощью «нортона» (рис. 11, и). Ведущий вал — , ведомый вал — . По мере сдвигания «нортона» вправо скорость ведомого вала растет.
Механизмы для изменения направления вращения (реверсирования) многообразны. В качестве примера на рис. 11, л и м приведены механизмы реверсирования за счет переключения муфты. Для преобразования вращательного движения в поступательное применяют несколько видов механизмов.
Реечная передача (рис. 16, в и г) состоит из зубчатого колеса, имеющего Z зубьев, и зубчатой рейки. Если модуль реечного зацепления m, а вращательное движение совершает зубчатое колесо, то за один его оборот рейка перемещается на расстояние S = π m Z.
Винтовая передача (рис. 19 и 11, ж) состоит из ходового винта 2 с шагом Р и ходовой гайки 1. В cтанках с программным управлением используют шариковые винтовые пары, которые имеют высокие точность и КПД. За один оборот ходового винта, имеющего k заходов, гайка перемещается на расстояние S = P k.
Кривошипно-ползунный механизм (рис. 20) широко применяется в кривошипных прессах для горячей и холодной штамповки. Здесь при обороте кривошипа 2 ползун 1 движется поступательно и производит штамповку. В двигателях внутреннего сгорания, наоборот, газы в цилиндрах давят на поршни 1, которые, воздействуя на шатуны ВС, вращают коленвал 2.
Кулисный механизм (рис. 21) трансформирует вращательное движение в поступательное в поперечно-строгальных станках и др.
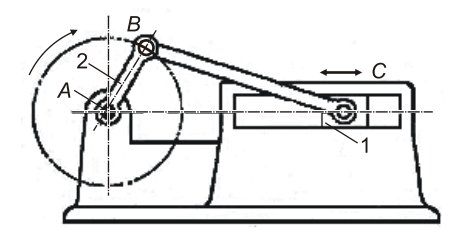
Рис. 20. Кривошипно-ползунный механизм
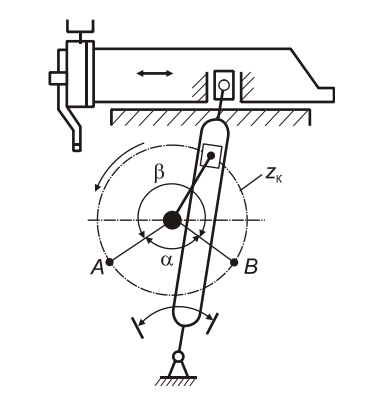
Рис. 21. Кулисный механизм
При вращении кривошипа 1 ползун 2 перемещается по направляющим кулисы 3, качающейся на оси 4. Ползун станка 5 с резцом 6 под действием кулисы движется возвратно-поступательно.
В приводах движения подачи и во вспомогательных кинематических цепях широко применяют кулачковые механизмы. При этом характер движения ведомого звена может быть установлен соответствующим профилированием кулачка.
Кулачки могут быть связаны с подвижным рабочим органом непосредственно (рис. 22, а) или через промежуточную передачу (рис. 22, б). В первом случае кулачок 4 действует на палец 3, жестко связанный с рабочим органом (например, суппортом станка) 2. Пружина 1 обеспечивает контакт ролика с кулачком и осуществляет обратный ход суппорта. Во втором случае вращающийся на оси 5 плоский кулачок 4 находится в контакте с роликом двухплечего рычага 3, имеющего зубчатый сектор, связанный с рейкой 2. При повороте рычага 3 с сектором вокруг точки О суппорт 1 пeремещается в направлении, показанном стрелкой.
Форма профиля кулачков зависит от принятого закона движения исполнительного органа. Рабочие участки профиля, осуществляющего равномерное перемещение ведомого звена (например, движение подачи), очерчивают по спирали Архимеда. Обычно кулачок вращается равномерно, следовательно, угол поворота и приращение радиуса кривизны, а с ним и перемещение рабочего органа будут пропорциональны времени.
Механизмы с цилиндрическим кулачком 1 (рис. 22, в, г) применяются, например, в устройствах подачи заготовки токарных автоматов (2 — палец; 3 — подающий механизм; 4 — рычаг).
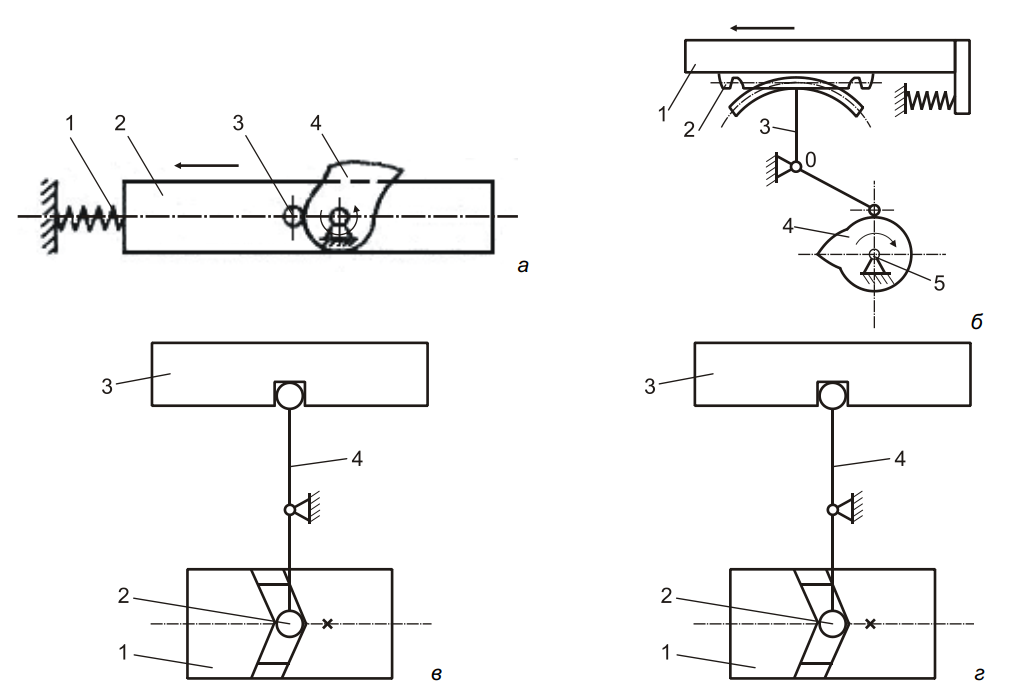
Рис. 22. Кулачковые механизмы
В ряде случаев вращение одному валу от двух самостоятельных приводов может быть передано одновременно через механизм обгона (рис. 23) — двустороннюю муфту свободного хода. Движение валу 1 против или по часовой стрелке может передаваться с малой скоростью от колеса 2, закрепленного на ступице барабана 3, или же с большей скоростью от колеса 5.
При движении колеса 2 по стрелке ролики 7 заклиниваются и вилки 4 с колесом 5 вращаются вхолостую. При передаче движения от колеса 5 в ту же сторону, с большей скоростью вилка 4 передает движение валу 1 через ролики 6, упирающиеся в выступ звездочки 8. При вращении колеса 5 в направлении, противоположном колесу 2, вилка 4 передает движение валу 1 через ролик 7. Таким образом, независимо от вращения колеса 2 валу 1 можно передавать движение с большей скоростью в двух направлениях.
Для осуществления периодических движений используют храповые и мальтийские механизмы (см. рис. 11, н). Первые применяют в тех случаях, когда необходимо осуществлять прерывистые движения рабочих органов в течение коротких промежутков времени.
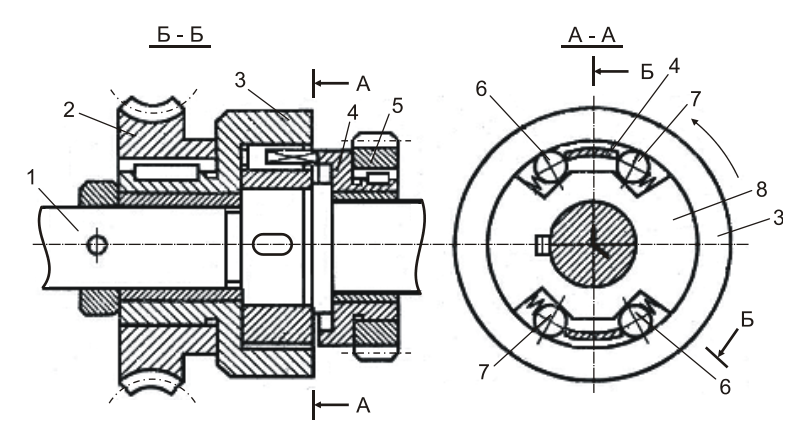
Рис. 23. Двусторонняя муфта свободного хода
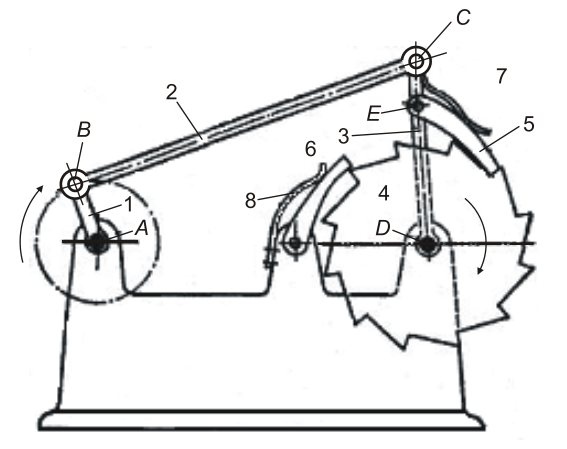
Рис. 24. Храповой механизм
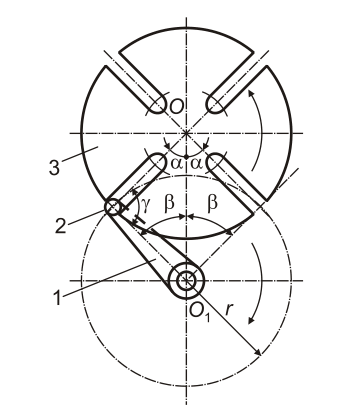
Рис. 25. Мальтийский механизм
Храповой механизм (рис. 24) работает так. Кривошип 1 вращается непрерывно. Рычаг 3 под действием шатуна 2 с собачкой 5 получает качательное движение. При движении вправо собачка 5, прижимаемая к храповому колесу 4 пружиной 7, захватывает зубья храпового колеса 4 и поворачивает его вокруг оси D. При движении рычага 3 влево собачка 5 проскальзывает по зубьям колеса 4, которое удерживается от поворота в обратном направлении собачкой 6, прижимаемой к колесу 4 пружиной 8.
Мальтийские механизмы (рис. 25) предназначены для периодического поворота. Они состоят из кривошипа 1 с цевкой 2 на конце и диска 3, имеющего радиальные пазы. Кривошип вращается непрерывно. В определенный момент цевка входит в паз и, повернувшись на угол 2β вместе с диском 3, выходит из него. Диск 3 останавливается до попадания цевки 2 в следующий паз.
Муфты служат для соединения валов агрегатов, например электродвигателя и редуктора. Глухие муфты (рис. 26) требуют точного совпадения осей соединяемых валов. Когда достичь этого трудно применяют компенсирующие муфты (рис. 27 и 28): упруго-пальцевую (ведущие пальцы 2 облицованы резиновыми кольцами или втулками 1), дисковую (диск 2, проскальзывая по пазам полумуфт 1 и 3, компенсирует несовпадение осей валов) и др.
Для соединения вращающегося вала с невращающимся применяют сцепные муфты, например фрикционную дисковую (рис. 29, изображена в выключенном положении). Один из валов вращается, другой — нет. Диски 1 наружными шлицами входят в пазы буксы 3, сидящей на левом валу.
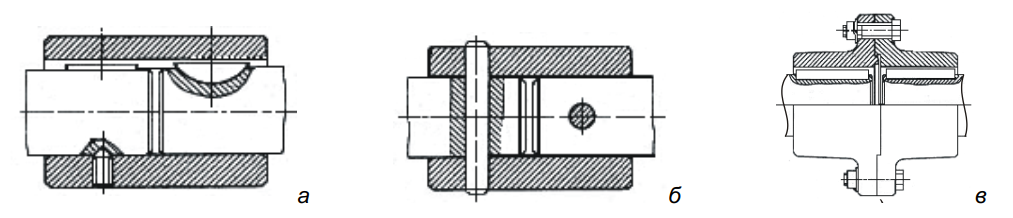
Рис. 26. Глухие муфты
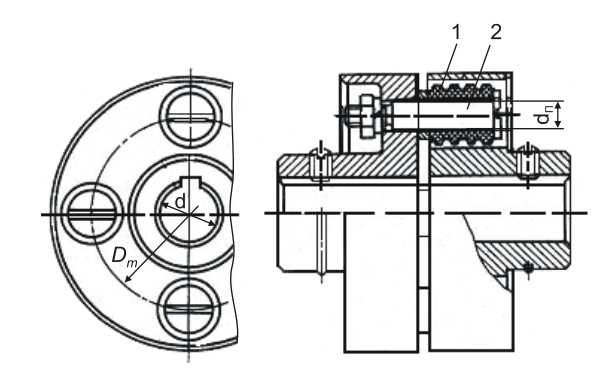
Рис. 27. Упругая пальцевая муфта
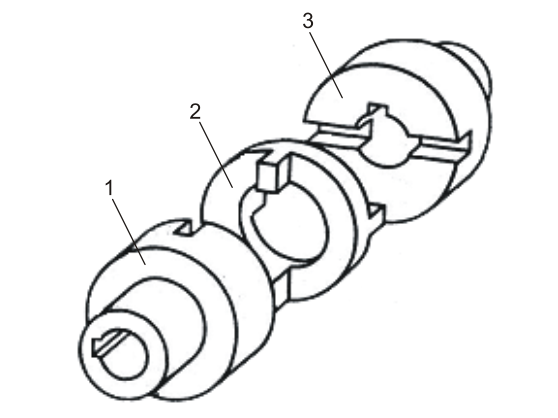
Рис. 28. Дисковая муфта
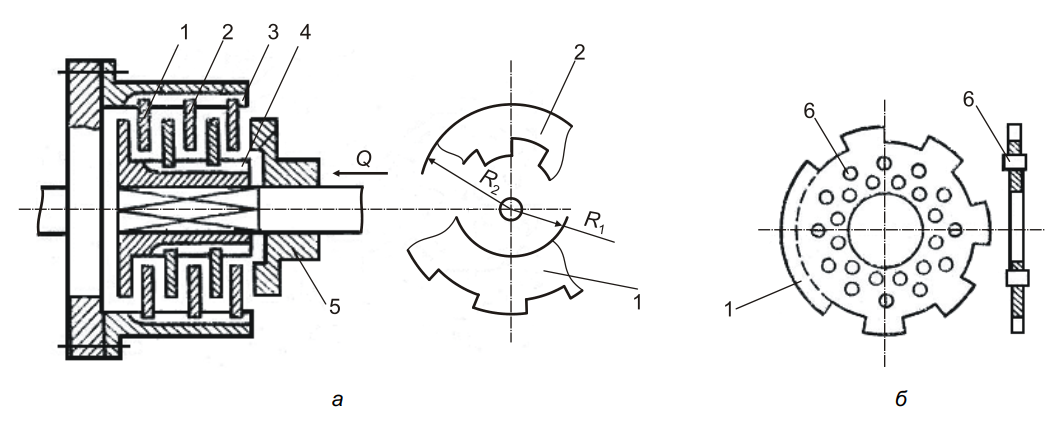
Рис. 29. Фрикционная дисковая сцепная муфта
Диски 2 внутренними шлицами входят в пазы втулки 4, сидящей на правом валу. Чтобы сцепить валы, втулка 5 вручную рычагом или автоматически (например, магнитом) с силой Q сжимает диски 1 и 2. Между дисками возникают силы трения, и вращение передается с вращавшегося вала на ранее неподвижный. Вставки 6 выполнены из материалов, увеличивающих силу трения.
Виды приводов…

Любому автолюбителю или даже человеку далекому от автомобилей, известно что в машинах существует три основных вида привода:
1. Задний привод, при котором отбор мощности и крутящего момента идет соответственно на заднюю ось;
2. Передний привод, работающий по диаметрально противоположенному принципу, имеющий диаметрально противоположенную компоновку;
3. Полный привод, сочетающий в себе все плюсы и минусы двух приводов.
Но, так или иначе, по каким-то причинам у многих людей остается множество вопросов, для каких целей, почему и зачем на тех или иных машинах используют различные виды приводов и компоновок. Из-за чего, например, на некоторые малолитражные автомобили ставится передний привод, а не задний, и действительно ли система полного привода (All Wheel Drive, AWD), не тоже самое, что технология 4WD (4×4).
Какой привод лучше
Из-за этого недопонимания было решено написать статью, краткое описание на тему трансмиссий автомобилей, их достоинствах и недостатках их общего принципа работы.
Тем, кто знаком с устройством автомобилей, статья будет не очень интересна, так как написана она для новичков, которые недавно получили свои ВУ и не имеют ни малейшего представления, в который он/она вступают.
Как небольшое отступление перед началом повествования, хотел бы заметить, что не все из нижеследующих утверждений обязательно верны. Современные технологии и гибридные силовые агрегаты, а также передовые материалы могут повлиять на применяемые технологии самым серьезным образом, сравняв или наоборот разграничив преимущества и недостатки различных систем и типов привода автомобилей.
Передний привод (FWD)
На сегодняшний день, это наиболее распространенный тип привода. Комбинация, двигатель/коробка переключения передач расположены спереди, зачастую поперек центральной оси автомобиля. Вся мощность, как следует из названия, идет на колеса передней оси.
Всего выделяется шесть разновидностей переднеприводной компоновки:
Двигатель установлен продольно, перед передней осью
Двигатель установлен продольно, за передней осью
Двигатель установлен продольно, над передней осью
Двигатель установлен поперечно, перед передней осью
Двигатель установлен поперечно, за передней осью
Двигатель установлен поперечно, над передней осью
Также выделяют три типа компоновки самого силового агрегата при переднем приводе:
Последовательная компоновка — двигатель, главная передача и коробка передач размещены друг за другом на одной оси
Параллельная компоновка — двигатель и трансмиссия расположены на параллельных друг другу осях на одном уровне по высоте
«Этажная» компоновка — двигатель расположен над трансмиссией
Преимущества переднеприводной компоновки
Прежде всего, во главу угла преимуществ переднего привода можно поставить его дешевизну, при использовании в массовом производстве и его технологичность, которые могут быть достигнуты в машинах подобной компоновке. Из-за этого данное экономичное решение часто можно увидеть на всевозможных малолитражных автомобилях.
Смотрите также: Избыточная поворачиваемость и недостаточная поворачиваемость
Нет необходимости перебрасывать мощность на заднюю ось, автоматически отпадает потребность в карданном вале, который проходил бы вдоль всего автомобиля, поэтому на переднеприводных машинах вы не увидите большого трансмиссионного тоннеля, убирается также и задний дифференциал, который обычно съедает некоторое количество пассажирского и багажного пространства.
Такая комбинация хороша зимой, потому, что весь вес двигателя нагружает ведущие колеса, что создает лучшее сцепление на заснеженных дорогах. Поскольку трансмиссия коротка, потери мощности небольшие, тем самым вы получите лучшую эффективность, которая в итоге выразится в меньшем расходе топлива. В обслуживании переднеприводные автомобили также немного дешевле.
Минусы переднего привода
Ну в первую очередь, передние колеса на переднеприводных компоновках переживают чрезмерные нагрузки. Поскольку они должны передавать крутящий момент двигателя, управлять автомобилем и одновременно гасить дорожные неровности. Добавьте к этому смещенный к передней оси центра тяжести (как мы уже говорили, двигатель и трансмиссия соединены вместе и максимально отодвинуты к переднему бамперу автомобиля) и в конечном итоге мы столкнёмся с плохой маневренностью. Радиус поворота у таких машин может быть больше, потому, что угол поворота ведущих колес уменьшается (Благодаря большому скоплению механических частей собранных в одном месте, под капотом).
Ускорение будет также менее интенсивным, поскольку центра массы автомобиля при наборе скорости будет сдвигаться по направлению к задней оси, на которые мощность не передается. Поэтому очень часто можно наблюдать пробуксовку передних колес у этих автомобилей, попросту говоря, они теряют некоторой процент сцепление с дорогой.
Бок о бок с ухудшенным ускорением приход «силовое подруливание», которое на практике проявляется, как склонность автомобиля смещаться влево или вправо при ускорении. Случается это потому, что на переднеприводных автомобиля с поперечно установленными двигателями, ставятся ШРУСы разной длины. Правый ШРУС может быть более длинный, чем левый или, наоборот, соответственно машину тянуть будет в разные стороны.
Это интересно: Полноприводная BMW M5? Именно, есть доказательства!
Такое наблюдать можно лишь при интенсивном разгоне, эффект не очень приятный, но опасности из себя не представляет.
И еще один минус переднего привода, недостаточная поворачиваемость. Технически говоря, если боковой увод передних колес больше, чем боковой увод задних, и угол поворота относительно центра масс уменьшается, то это и называется недостаточной поворачиваемостью. В таком случае автомобиль распрямляет траекторию в повороте. Очень типичный вариант для данного типа машин.
В случае сноса передних колёс:
На автомобилях всех типов: применить торможение двигателем и повернуть руль в сторону, противоположную повороту, пока сцепление не восстановится. После этого снизить скорость и вписаться в поворот.
Только для переднеприводного автомобиля: лёгкий снос можно скорректировать нажатием на сцепление.
Задний привод (RWD)
Как следует из названия двигатель располагается спереди, а мощность от него посылается на заднюю ось, через карданный вал и дифференциал в центр задней оси. Это классическая компоновка обычно используется на спортивных и дорогих машинах.
Ее плюсы
Прежде всего, данная компоновка дает возможность инженерам «поиграть» с распределением веса, немаловажный фактор для спортивных машин, да и вообще для любых машин.
Так как у этих автомобилей трансмиссия/дифференциал размещены позади двигателя, то добиться нужно развесовки на порядок проще, чем в переднеприводном варианте.
Так как на передние колеса приходится меньший вес и подкапотное пространство «не загромождено» различными дополнительными элементами, колеса могут поворачиваться на большие углы, что прилично улучшает управляемость автомобилем.
Среди плюсов заднего привода в первую очередь отмечаются проблемы переднеприводной компоновки: это меньший радиус поворота, лучшее поведение в поворотах, ускорение, отсутствует силовое подруливание, так как дифференциал расположен строго посередине оси, между двумя колесами и оба приводных вала имеют одинаковую длину.
Минусы заднего привода
Прибавляется больше веса, так как вы получаете карданный вал и дополнительно трансмиссионный тоннель на всю длину автомобиля. Больший вес означает большую потерю мощности, снижение КПД, снижение расхода топлива.
Если этого не достаточно, дополнительные компоненты увеличивают конечную стоимость автомобиля. Вы получите меньшего пассажирского и багажного пространства вследствие появления вышеупомянутого тоннеля и дифференциала на задней оси, над которым обычно располагается багажник.
Кроме того, поскольку вес, воздействующий на передние колеса уменьшается, они быстрее теряют сцепление на заснеженных дорогах, чем снижают безопасность поездок.
Наконец, дисбаланс распределения веса, часто приводит к тому, что заднеприводный автомобиль имеет избыточную поворачиваемость и при определенных условиях может легко пойти в занос.
У этой монеты есть две стороны, в неопытных руках, избыточная поворачиваемость может быть опасной, человек просто может потерять управление и это будет не самым приятным событием в жизни. А можно и наоборот, при определенных знаниях и умениях получать удовольствие дрифта (1GAI.RU ПРЕДУПРЕЖДАЕТ НИКОГДА, НИ ПРИ КАКИХ ОБСТОЯТЕЛЬСТВАХ НЕ ПЫТАЙТЕСЬ ПУСТИТЬ МАШИНУ В ЗАНОС НА ДОРОГАХ ОБЩЕСТВЕННОГО ПОЛЬЗОВАНИЯ, ЭТО КРАЙНЕ ОПАСНО!)
Полный привод (4×4)
Эта система обычно используется в истинных off-road машинах, предназначенных для бездорожья, которые нуждаются в максимальной передаче тяги на ведущие колеса.
Смотрите также: Современные тормозные системы в автомобилях
Большинство из этих автомобилей в обычных условиях будут работать как классическая заднеприводная машина и благодаря раздаточной коробке, мощность также может переходить на передние колеса, при необходимости.
В некоторых автомобилях комбинация 4×4 может работать перманентно, это означает, что все колеса на двух осях получают постоянную мощность и крутящий момент на все колеса двух осей в равной степени.
Почему это хорошо?
Если говорить прямо, с автомобилями 4×4 скользкие участки дорог и бездорожье больше не будет являться проблемой, за счет равномерного распределения мощности по осям. Неплохой разгон также будет сопутствовать автомобилю по этой же причине.
У 4×4 автомобилей есть и минусы
Самый главный враг полноприводных машин, это вес. По сравнению с автомобилями с задним приводом, он увеличивается еще больше. Так как вам потребуется уже две оси, с двумя дифференциалами и дополнительной раздаточной коробкой переключения передач.
Сложность системы и обилие дополнительных технических устройств приводят к потере мощности, снижению КПД и увеличению расхода топлива. Цена, как вы понимаете, такого автомобиля тоже высока.
Разгон такой машины может порадовать динамикой, но о больших цифрах на спидометре в плане максимальной скорости даже и не думайте. Эта технология дает возможность реализации максимальной отдачи крутящего момента, но не лошадиных сил. И чем быстрее вы будете ехать на полноприводном автомобиле, тем быстрее будет опустошаться ваш топливный бак. Аппетиты у полноприводных машин высоки.
Полный привод (AWD)
Система полного привода AWD распределит мощность по всем колесам, но не всегда в равных пропорциях. Все четыре колеса начинают получать мощность, только в определенных ситуациях, которые требуются для этого. Такие как скользкая дорога или пересеченная местность. Система нашла себя как на внедорожниках, так и на автомобилях других типов и классов.
30 лет полноприводных БМВ: от механических к гибридным системам AWD
Плюсы и минусы системы AWD
Образно говоря AWD старается усидеть на двух стульях, от чего страдает качество. При скоростном движении или при движении на малых скоростях мощность «находит» наименее затратный путь от двигателя на колеса, чтобы минимизировать потери и увеличить КПД. Когда появляется потребность в мощности, в ситуациях с резким ускорением или для того чтобы подняться на крутой подъем, эта система автоматически переключается в режим распределения 50/50 на две оси, мгновенно переводя ваш передне- или заднеприводный автомобиль в 4WD.
Пытаясь быть лучшей в двух ипостасях означает, что вы должны идти на компромиссы. Эта технология делает необходимым постоянно «носить» с собой лишний вес. Система AWD является более сложной. Она дороже в обслуживании и ремонте, чем классический 4WD и по сравнению с ним менее надежна и долговечна