12. Синхронные двигатели
12.1. Назначение и область применения синхронных машин
Синхронные машины – это такие машины переменного тока, у которых частота вращения ротора равна частоте вращения поля статора (n1 = n2), поэтому скольжение у синхронных машин равно нулю. (s = 0). Синхронные машины обратимы, т. е. они могут быть как дви-гателями, так и генераторами.
Синхронные генераторы являются основными источниками электрической энергии в промышленных сетях электроснабжения, на транспорте, передвижных электростанциях и т. д.
Синхронные двигатели (СД) применяются в приводах большой мощности (несколько десятков мегаватт).
Синхронные двигатели приводят во вращение насосы компрессоры, вентиляторы и другие механизмы, работающие с неизменной угловой скоростью.
Кроме того, синхронные двигатели используются в качестве синхронных компенсаторов для улучшения коэффициента мощности предприятия, так как они могут работать в отличие от асинхронных двигателей с различной реактивной мощностью – индуктивной или емкостной. Компенсаторы работают в режиме холостого хода и отдают в сеть только реактивную составляющую мощности, которая необходима для асинхронных двигателей.
Специальные СД малой мощности используются в устройствах, где требуется строгое постоянство угловой скорости – например, электрочасы, автоматические самопишущие приборы, устройства с программным управлением. Изготовление синхронных двигателей сложнее асинхронных и стоимость их выше.
12.2. Устройство, принцип действия и пуск синхронных двигателей
Синхронный двигатель преобразует электрическую энергию переменного тока в механическую энергию при неизменной частоте вращения ротора, равной частоте вращения магнитного поля статора, не зависящей от нагрузки.
СД состоит из неподвижной части – статора и подвижной –ротора. Статор ничем не отличается от статора асинхронного двигателя, статорная обмотка также подключена к сети трехфазного переменного тока.
На роторе имеется обмотка, которая называется обмоткой возбуждения, она подключена через щетки и контактные кольца к независимому источнику постоянного тока – возбудителю.
Ротор СД бывает явнополюсный и неявнополюсный. Синхронные машины проектируют так, чтобы количество полюсов магнитного поля ротора и магнитного поля статора было одинаковым.
Если обмотку возбуждения ОВ синхронного двигателя подключить к источнику постоянного тока, а статорную обмотку включить в сеть трехфазного тока, то СД вращаться не будет, так как возникающее магнитное поле будет вращаться с большей скоростью 1 относительно неподвижного пока ротора 2.
Электрическая схема синхронной машины показана на рис. 94.

Это объясняется тем, что вращающееся магнитное поле статора мгновенно набирает скорость, а ротор в силу механической инерции также мгновенно двигаться не может.
Поэтому ротор СД необходимо раскручивать тем или иным способом до частоты вращения, близкой к синхронной.
Существует два способа пуска синхронных двигателей.
1. Синхронный пуск осуществляется с помощью дополнительного разгонного двигателя, находящегося на одном валу с ротором СД, который заставляет ротор вращаться. Этот способ используется только при холостом ходе синхронного двигателя и в настоящее время почти не применяется.
Мощность разгонного двигателя невелика, она определяется мощностью, необходимой только для вращения ротора СД. Когда частота вращения ротора достигает частоты вращения магнитного поля статора, обмотку статора СД подключают к сети трехфазного переменного тока, а в обмотку ротора подается постоянный ток. После этого разгонный двигатель отключается и СД вращается с синхронной скоростью.
2. Асинхронный пуск. При явнополюсном роторе в полюсные наконечники закладывается короткозамкнутая пусковая обмотка из медных или латунных стержней. Она напоминает беличье колесо асинхронной машины, но занимает лишь часть окружности ротора.
Пуск двигателя состоит из двух этапов:
– первый этап: асинхронный набор частоты вращения при отсутствии возбуждения постоянным током;
– второй этап: втягивание в синхронизм после включения постоянного тока возбуждения.
Во время первого этапа обмотку возбуждения СД, находящуюся на роторе, отключают от источника постоянного тока и замыкают на резистор R = (610) RВ, где RВ – сопротивление обмотки возбуждения, т. к. при разомкнутой обмотке в ней может индуктироваться значительная ЭДС, опасная для целостности изоляции.
Двигатель становится как бы асинхронным, и под действием асинхронного момента скорость ротора удается довести примерно до 0,951.
После того, как ротор разогнался, обмотку возбуждения снова подключают к источнику постоянного тока (второй этап). Возникает синхронный электромагнитный момент, машина втягивается в синхронизм, т. е. ротор и поле статора вращаются синхронно (1 = 2).
При нагрузке на валу в статорной обмотке возникают активные составляющие тока  , которые имеют направление, противоположное направлению ЭДС в роторе. Эти токи создают свое вращающее магнитное поле.
, которые имеют направление, противоположное направлению ЭДС в роторе. Эти токи создают свое вращающее магнитное поле.
В результате воздействия магнитного поля токов статора  на постоянные токи обмотки возбуждения ротора возникает электромагнитный момент, вращающий ротор.
на постоянные токи обмотки возбуждения ротора возникает электромагнитный момент, вращающий ротор.
Иначе говоря, образование вращающего электромагнитного момента синхронного двигателя можно рассматривать как результат взаимодействия полюсов двух намагниченных тел – статора и ротора, причем ведущий элемент – полюсы статора, а ведомый – полюсы ротора.
Этот вращающий момент уравновешивает противодействующий момент рабочего механизма.
Равенство моментов двигателя и нагрузки не превышает наибольшего значения момента, который в состоянии развить синхронный двигатель.
Если равновесие моментов будет невозможно, то поддержание синхронной скорости вращения ротора нарушается и машина выпадает из синхронизма, скорость машины начинает падать, возникают недопустимые колебания тока и вращающего момента, при этом двигатель надо немедленно отключить от сети.
Уменьшение напряжения в сети, питающей статор, приводит к уменьшению максимального момента, развиваемого двигателем и к снижению его запаса устойчивости, но соответствующим регулированием тока возбуждения ротора можно восстановить прежнее значение момента Mmax. Этим синхронный двигатель выгодно отличается от асинхронного.
Недостатки синхронных двигателей:
– сложность конструкции ротора;
– необходимость наличия источника постоянного тока;
Поэтому СД целесообразно применять для установок большой мощности >> 100 кВт, работающих в условиях редких пусков.
12.3. U-образная характеристика синхронного двигателя. Синхронный компенсатор
Рассмотрим режим работы синхронного двигателя, когда тормозной момент на валу M2 постоянен, а ток возбуждения IВ на роторе меняется.
Для СД, у которого частота вращения const, постоянство тормозного момента M2 означает, что полезная мощность P2 – постоянная, а следовательно, потребляемая из сети мощность P1 и электромагнитная мощность также постоянные. На этом основании строятся U-образные характеристики – зависимость тока статора и коэффициента мощности (I1 и cos 1) от тока возбуждения IВ при M2 = const и Uсети = const.
На рис. 95 представлено семейство таких характеристик для разных значений моментов M2.
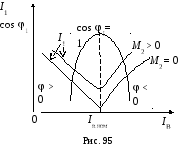
Величина и знак угла сдвига фаз между током и напряжением зависят от величины тока возбуждения Iв. Изменяя ток возбуждения синхронного двигателя, можно установить такой режим работы, при котором ток, потребляемый двигателем, будет опережать напряжение.
При недовозбуждении, т. е. когда Iв < Iном, СД ведет себя как индуктивная нагрузка для сети (потребляет из сети реактивную составляющую), а при перевозбуждении, т. е. когда Iв > Iном СД ведет себя как емкостная нагрузка для сети (отдает в сеть реактивную составляющую). За счет опережающего емкостного тока осуществляется компенсация коэффициента мощности сети.
Это свойство синхронных двигателей используется в синхронных компенсаторах.
Синхронный компенсатор – это синхронный двигатель облегченной конструкции, работающий в режиме холостого хода при значительном перевозбуждении.
Синхронный компенсатор является местным источником реактивной мощности для электроприемников, он освобождает линии передачи большой протяженности от передачи реактивной мощности; устанавливается на крупных подстанциях. Синхронный компенсатор также может стабилизировать напряжение сети: при повышении напряжения сети надо уменьшать ток возбуждения, при понижении напряжения сети – увеличивать ток возбуждения.
На рис. 96, а, б показана линия передачи электроэнергии с применением синхронного компенсатора (а) и приведена векторная диаграмма, поясняющая его применение (б).
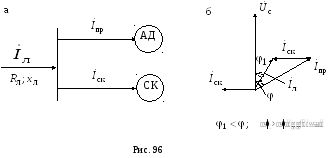
При подключении синхронного компенсатора в точке включения электроприемника АД (рис. 96, а) ток в линии равен векторной сумме тока приемника и компенсатора  . Как видно из векторной диаграммы (рис. 96, б), ток в линии уменьшается (
. Как видно из векторной диаграммы (рис. 96, б), ток в линии уменьшается ( ), угол сдвига фаз (1 < )между током Iл и напряжением сети уменьшается, а коэффициент мощности увеличивается (cos 1 > cos ).
), угол сдвига фаз (1 < )между током Iл и напряжением сети уменьшается, а коэффициент мощности увеличивается (cos 1 > cos ).
Таким образом, синхронный компенсатор является местным источником реактивной мощности для электроприемников, он освобождает линии передачи большой протяженности от передачи реактивной мощности и позволяет улучшить коэффициент мощности электрической системы. Синхронные компенсаторы устанавливают на крупных подстанциях.
Что такое синхронный двигатель и где он используется
Синхронные электродвигатели (СД) не так распространены, как асинхронные с короткозамкнутым ротором. Но используются там, где нужен большой крутящий момент и в процессе работы будут происходить частые перегрузки . Также такой тип двигателей используются там, где нужна большая мощность, чтобы приводить в движение механизмы, благодаря высокому коэффициенту мощности и возможности улучшать коэффициент мощности сети, что существенно снизит затраты на электроэнергию и нагрузку на линии. Что такое синхронный двигатель, где он используется и какие у него плюсы
минусы мы рассмотрим в этой статье.
Определение и принцип действия
Если говорить простым языком, то синхронным называют электродвигатель, у которого скорость вращения ротора (вала) совпадает со скоростью вращения магнитного поля статора.
Кратко рассмотрим принцип действия такого электродвигателя — он основан на взаимодействии вращающегося магнитного поля статора, которое обычно создаётся трёхфазным переменным током и постоянного магнитного поля ротора.
Постоянное магнитное поле ротора создаётся за счет обмотки возбуждения или постоянных магнитов. Ток в обмотках статора создаёт вращающееся магнитное поле, тогда как ротор в рабочем режиме представляет собой постоянный магнит, его полюса устремляются к противоположным полюсам магнитного поля статора. В результате ротор вращается синхронно с полем статора, что и является его основной особенностью.
Напомним, что у асинхронного электродвигателя скорость вращения МП статора и скорость вращения ротора отличаются на величину скольжения, а его механическая характеристика «горбатая» с пиком при критическом скольжении (ниже его номинальной скорости вращения).
Скорость, с которой вращается магнитное поле статора, может быть вычислена по следующему уравнению:
f – частота тока в обмотке, Гц, p – количество пар полюсов.
Соответственно по этой же формуле определяется скорость вращения вала синхронного двигателя.
Большинство электродвигателей переменного тока, используемых на производстве, выполнены без постоянных магнитов, а с обмоткой возбуждения, тогда как маломощные синхронные двигатели переменного тока выполняются с постоянными магнитами на роторе.
Ток к обмотке возбуждения подводится за счет колец и щеточного узла. В отличие от коллекторного электродвигателя, где для передачи тока вращающейся катушке используется коллектор (набор продольно расположенных пластин), на синхронном установлены кольца поперек одного из концов статора.

Источником постоянного тока возбуждения в настоящее время являются тиристорные возбудители, часто называемые «ВТЕ» (по названию одной из серий таких устройств отечественного производства). Ранее использовалась система возбуждения «генератор-двигатель», когда на одном валу с двигателем устанавливали генератор (он же возбудитель), который через резисторы подавал ток в обмотку возбуждения.
Ротор почти всех синхронных двигателей постоянного тока выполняется без обмотки возбуждения, а с постоянными магнитами, они хоть и похожи по принципу действия на СД переменного тока, но по способу подключения и управления ими очень сильно отличаются от классических трёхфазных машин.
Одной из основных характеристик электродвигателя является механическая характеристика. Она у синхронных электродвигателей приближена к прямой горизонтальной линии. Это значит, что нагрузка на валу не влияет на его обороты (пока не достигнет какой-то критической величины).

Это достигается именно благодаря возбуждению постоянным током, поэтому синхронный электродвигатель отлично поддерживает постоянные обороты при изменяющихся нагрузках, перегрузках и при просадках напряжения (до определенного предела).
Ниже вы видите условное обозначение на схеме синхронной машины.

Конструкция ротора
Как и любой другой, синхронный электродвигатель состоит из двух основных частей:
- Статор. В нём расположены обмотки. Его еще называют якорем.
- Ротор. На нём устанавливают постоянные магниты или обмотку возбуждения. Его также называют индуктором, из-за его предназначения — создавать магнитное поле).
Для подачи тока в обмотку возбуждения на роторе устанавливают 2 кольца (так как возбуждение постоянным током, на одно из них подают «+», а на другое «—»). Щетки закреплены на щеткодержателе.

Роторы у синхронных электродвигателей переменного тока бывают двух типов, в зависимости от назначения:
- Явнополюсные. Четко видны полюса (катушки). Используют при малых скоростях и большом числе полюсов.
- Неявнополюсные – выглядит как круглая болванка, в прорези на которой уложены провода обмоток. Используют при больших скоростях вращения (3000, 1500 об/мин) и малом числе полюсов.

Пуск синхронного двигателя
Особенностью этого вида электрических машин является то, что его нельзя просто подключить к сети и ожидать его запуска. Кроме того, что для работы СД нужен не только источник тока возбуждения, у него и достаточно сложная схема пуска.

Запуск происходит как у асинхронного двигателя, а для создания пускового момента кроме обмотки возбуждения на роторе размещают и дополнительную короткозамкнутую обмотку «беличью клетку». Её еще называют «демпфирующей» обмоткой, потому что она повышает устойчивость при резких перегрузках.
Ток возбуждения в обмотке ротора при пуске отсутствует, а когда он разгоняется до подсинхронной скорости (на 3-5% меньше синхронной), подаётся ток возбуждения, после чего он и ток статора совершает колебания, двигатель входит в синхронизм и выходит на рабочий режим.
Для ограничения пусковых токов мощных машин иногда уменьшают напряжение на зажимах обмоток статора, подключив последовательно автотрансформатор или резисторы.
Пока синхронная машина запускается в асинхронном режиме к обмотке возбуждения подключаются резисторы, сопротивление которых превышает сопротивление самой обмотки в 5 — 10 раз. Это нужно чтобы пульсирующий магнитный поток, возникающий под действием токов, наводимых в обмотке при пуске, не замедлял разгон, а также чтобы не повредить обмотки из-за индуцируемыми в ней ЭДС.
Видов таких машин очень много, выше была описана конструкция синхронного электродвигателя переменного тока с обмотками возбуждения, как самого распространенного на производстве. Есть и другие типы, такие как:
- Синхронные двигатели с постоянными магнитами. Это различные электродвигатели, такие как PMSM – permanent magnet synchronous motor, BLDC – Brushless Direct Current и прочие. Отличия, между которыми, состоят в способе управления и форме тока (синусоидальная или трапецивиденая). Их еще называют бесколлекторными или бесщеточными двигателями. Используются в станках, радиоуправляемых моделях, электроинструменте и т.д. Они работают не напрямую от постоянного тока, а через специальный преобразователь.
- Шаговые двигатели — синхронные бесщеточные двигатели, у которых ротор точно удерживает заданное положение, их используют для позиционирование рабочего инструмента в ЧПУ станках и для управления различными элементами автоматических систем (например, положение дроссельной заслонки в автомобиле). Состоят из статора, в этом случае на нём расположены обмотки возбуждения, и ротора, который выполнен из магнито-мягкого или магнито-твёрдого материала. Конструктивно очень похожи на предыдущие типы.
- Реактивные.
- Гистерезисные.
- Реактивно-гистерезисные.
Последние три типа СД также не имеют щеток, они работают за счет особой конструкции ротора. У реактивных СД различают три их конструкции: поперечно-расслоенный ротор, ротор с явновыраженными полюсами и аксиально-расслоенный ротор. Объяснение принципа их работы достаточно сложно, и займет большой объём, поэтому мы опустим его. Такие электродвигатели на практике вы, скорее всего, встретите нечасто. В основном это маломощные машины, используемые в автоматике.

Сфера применения
Синхронные двигатели стоят дороже чем асинхронные, к тому же требуют дополнительного источника постоянного тока возбуждения – это отчасти снижает ширину области применения этого вида электрических машин. Однако, синхронные электродвигатели используют для привода механизмов, где возможны перегрузки и требуется точное поддерживание стабильных оборотов.

При этом чаще всего используются в области больших мощностей — сотен киловатт и единиц мегаватт, и, при этом, пуск и остановка происходят достаточно редко, то есть машины работают круглосуточно долгое время. Такое применение обусловлено тем, что синхронные машины работают с cosФи приближенном к 1, и могут выдавать реактивную мощность в сеть, в результате чего улучшается коэффициент мощности сети и снижается её потребление, что важно для предприятий.
Преимущества и недостатки
Если говорить простыми словами, то у любой электрической машины есть свои плюсы и минусы. У синхронного двигателя положительными сторонами является:
- Работа с cosФи=1, благодаря возбуждению постоянным током, соответственно они не потребляют реактивной мощности из сети.
- При работе, с перевозбуждением отдают реактивную мощность в сеть, улучшая коэффициент мощности сети, падение напряжения и потери в ней и повышается КМ генераторов электростанциях.
- Максимальный момент, развиваемый на валу СД, пропорционален U, а у АД — U² (квадратичная зависимость от напряжения). Это значит, что у СД хорошая нагрузочная способность и устойчивость работы, которые сохраняются при просадке напряжения в сети.
- В следствие всего этого скорость вращения стабильна при перегрузках и просадках, в пределах перегрузочной способности, особенно при повышении тока возбуждения.
Однако существенным недостатком синхронного двигателя является то, что его конструкция сложнее, чем у асинхронных с КЗ-ротором, нужен возбудитель, без которого он не сможет работать. Всё это приводит к большей стоимости по сравнению с асинхронными машинами и сложностями в обслуживании и эксплуатации.
Пожалуй, на этом достоинства и недостатки синхронных электродвигателей заканчиваются. В этой статье мы постарались кратко изложить общие сведения о синхронных электродвигателях. Если у вас есть чем дополнить материал – пишите в комментариях.
Синхронный двигатель: устройство и принцип работы
Синхронный электродвигатель – это электрическое устройство, которое преобразует электроэнергию в механическую, обеспечивая вращение вала. Его основная особенность заключается в том, что скорость вращения ротора синхронизирована с частотой переменного тока подаваемого питания.
Содержание
Синхронные электродвигатели являются важной частью современных систем электропривода. Они широко применяются на промышленных предприятиях, где требуется точное управление скоростью и надежная работа.
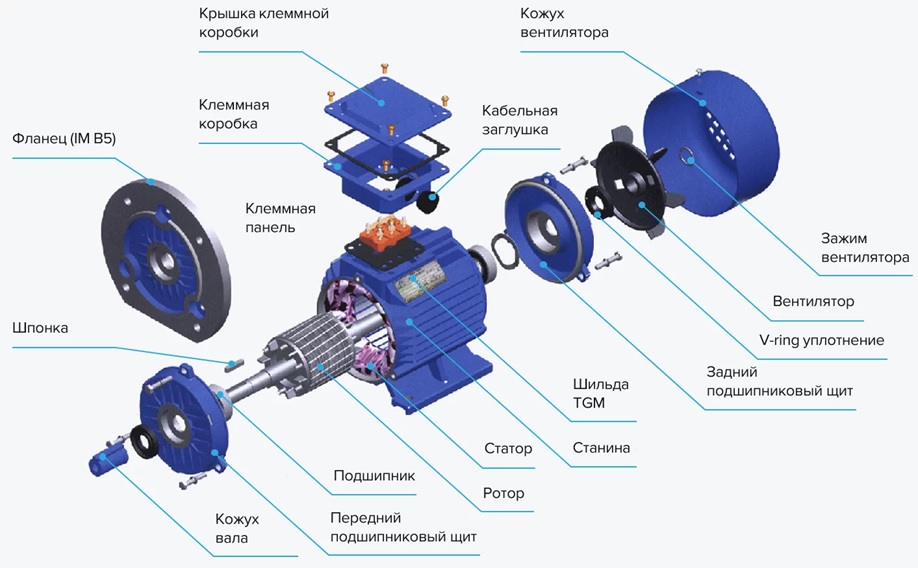
Устройство синхронного электродвигателя
Устройство включает в себя несколько ключевых компонентов, которые работают совместно, чтобы обеспечить стабильную и эффективную работу:
- Статор является неподвижной частью. Он состоит из стальных ламелированных пакетов, в которые вкладываются обмотки. Обмотки статора обычно выполнены в трехфазном исполнении и размещены на определенном расстоянии друг от друга. По этим обмоткам поступает переменное напряжение, создающее магнитное поле вокруг статора.
- Ротор является вращающейся частью. Он может быть выполнен в виде обмоток, намотанных на железный каркас (обмоточный тип), либо из постоянных магнитов. Помещается внутри статора, располагается на валу и вращается с той же скоростью, что и магнитное поле статора.
- Подшипники и вал позволят ротору свободно вращаться внутри статора. Качество и точность подшипников влияет на эффективность и долговечность двигателя.
- Коммутационная система позволяет подавать электрический ток на обмотки статора в нужной последовательности. Для этого используются щетки и коллекторы для устройств с обмоточным ротором, либо более сложные системы для моделей с постоянно-магнитным элементом.
Синхронные двигатели, особенно в больших и интенсивно работающих системах, требуют эффективной системы охлаждения. Это помогает предотвратить перегрев двигателя и обеспечивает его стабильную работу. Устройства могут быть помещены в защитную оболочку или корпус, который защищает их от воздействия окружающей среды, пыли, влаги и других внешних факторов.
Принцип работы синхронного электродвигателя
Основан на взаимодействии магнитных полей статора и ротора. Это взаимодействие обеспечивает синхронное вращение ротора с определенной скоростью, связанной с частотой переменного тока, подаваемого на статор. При работе индуктора создается магнитное поле, которое меняет свою полярность согласно частоте переменного тока. Это магнитное поле образует вращающееся поле, которое называется вращающимся магнитным полем статора.
Ротор находится внутри вращающегося магнитного поля статора. Если он также содержит обмотки, то под воздействием вращающегося магнитного поля он начинает выстраиваться параллельно этому полю и вращаться в синхронном режиме с ним. Если ротор является постоянным магнитом, то он будет «захвачен» вращающимся полем статора.
Скорость вращения ротора определяется частотой переменного тока и числом пар полюсов. Одним из преимуществ является возможность точного управления скоростью вращения. Это достигается с помощью частотных преобразователей, которые изменяют частоту тока, подаваемого на статор, что влияет на скорость вращения ротора.
Характеристики синхронного электродвигателя
Конкретные характеристики двигателя могут различаться в зависимости от их конструкции, применения и производителя. Основные характеристики:
- номинальная мощность – максимальная мощность, которую двигатель способен развивать при номинальных условиях работы;
- напряжение питания (переменного тока) – 380 В или 220 В;
- частота переменного тока (Гц) – 50 или 60 Гц;
- число пар полюсов на статоре или роторе – влияет на синхронную скорость вращения двигателя, например, 4 пары полюсов дают показатель 1500 об/мин (при частоте 50 Гц);
- эффективность (%) – отношение выходной механической мощности к входной электрической мощности, высокий показатель свидетельствует о том, что меньше энергии теряется в виде тепла;
- коэффициент мощности – показывает, насколько активная мощность близка к полной, близкое к 1 значение описывает мало реактивной мощности;
- момент инерции ротора (кг·м²) – указывает на его инерционные свойства (важно при оценке динамических характеристик двигателя);
- класс изоляции – указывает на максимальную температуру, которую может выдержать покрытие;
- класс защиты (IP) – указывает на степень защищенности корпуса от пыли и влаги (IP55, IP65);
- вес (кг) – масса устройства влияет на его установку и транспортировку;
- тип охлаждения – воздушное или жидкостное.
Выбор конкретных характеристик зависит от требований основного технологического оборудования и условий его эксплуатации. Синхронные электродвигатели находят применение в различных областях, таких как горнодобывающие, обогатительные и металлургические комбинаты, производство минеральных удобрений, цементная и нефтегазовая промышленность.
Как это работает: синхронный электродвигатель
Синхронные электродвигатели впервые появились в середине XIX века и сегодня широко применяются в газо- и нефтедобывающей промышленности, станкостроении, автомобилестроении, ЖКХ и других отраслях. Они хорошо справляются с перегрузками и могут стабильно работать долгое время без остановки. Именно такие двигатели для самых разных задач выпускает Калужский электромеханический завод концерна «Автоматика».
О том, как устроен и как работает синхронный электродвигатель, читайте в нашем материале.
По законам магнетизма
Синхронные электродвигатели служат людям в самых разных отраслях промышленности. Благодаря своим характеристикам они могут приводить в движение мощные приводы, устойчивы к ударным нагрузкам, часто возникающим, например, в металлургии и машиностроении. Такие двигатели подходят для длительной постоянной работы в приводах насосов, вентиляторов, компрессоров, генераторов – устройств, которые используются практически на каждом промышленном производстве. Конструктивная сложность таких двигателей окупается их высоким КПД и экономичностью.
Фото: концерн «Автоматика»
В основе работы синхронного электродвигателя лежит знакомый всем по урокам физики эффект отталкивания одноименных магнитных полюсов. Не погружаясь в терминологию, эту работу можно описать так: стационарная и движущаяся части устройства отталкиваются друг от друга, в результате чего получается полезный крутящий момент, то есть электрическая энергия превращается в механическую.
Принципиальная конструкция любого электродвигателя такова: неподвижная часть (статор), подвижная часть (ротор), ось ротора с подшипниками, корпус и провода. Нужно упомянуть, что электродвигатели бывают постоянного и переменного тока, последние в свою очередь делятся на асинхронные и синхронные.
Как работает синхронный двигатель
Чтобы получить полезное действие, практически в любой электротехнике, где движение вызывается благодаря электромагнитному полю, применяется закон Ампера. Именно Мари Ампер в 1820 году установил, что между двумя параллельными проводниками, подключенными к постоянному току, действует притяжение, если токи однонаправленные, или отталкивание, если токи противоположные. Сила Ампера приводит в движение электропоезда и трамваи, двери лифтов и электрические ворота, а также заставляет звучать виброзвонок в вашем смартфоне.
Если в качестве проводника тока мы возьмем рамку и разместим ее в магнитное поле между двумя магнитами, на нее начнет действовать сила Ампера, то есть линии магнитной индукции начнут толкать проводник. Закрепив эту рамку посредством подшипников на оси, мы получим вращение.
alt=»Разработка «Росэлектроники» повысит энергоэффективность лифтов» />
Фото: концерн «Автоматика»
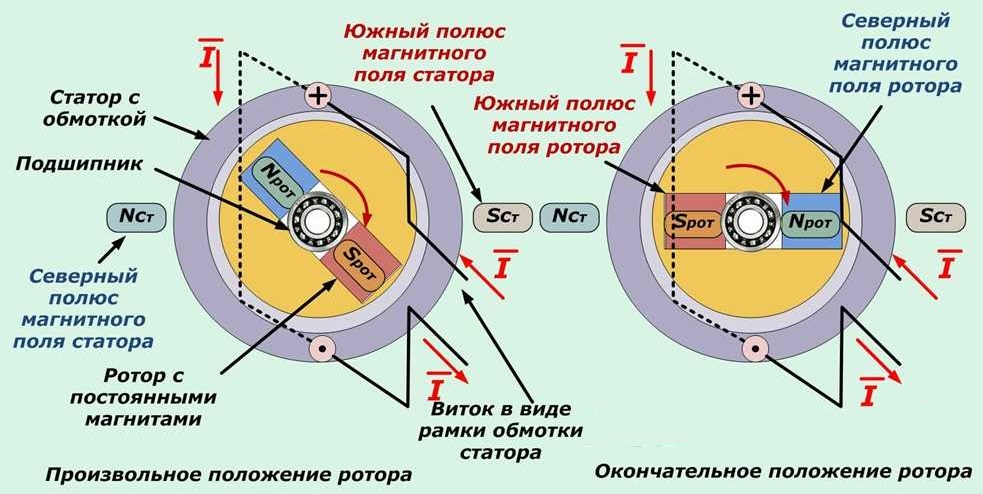
В синхронном двигателе статор создает вращающееся магнитное поле, а ротор − постоянное магнитное поле. На статоре присутствует электрическая цепь в виде обмотки, на которую подается трехфазное напряжение, создающее магнитное поле, которое вращается с синхронной скоростью. Обмотка ротора возбуждается источником питания постоянного тока, поэтому он действует как постоянный магнит. Разноименные полюса ротора будут притягиваться к соответствующим полюсам вращающегося поля статора. При таком взаимодействии возникает крутящий момент, вращающий вал. Скорость вращения будет равна частоте вращающегося магнитного поля неподвижного статора.
Если противополюсные магниты статора и ротора совпадают, они вращаются с синхронной скоростью. Если ротор не имеет первоначального вращения, то появится отталкивающая сила, и ротор не сможет начать вращение. Таким образом синхронные двигатели – это двигатели без самозапуска.
Для запуска ротора синхронного двигателя между краями полюсов устанавливается так называемое «беличье колесо». При запуске на катушки ротора не подается напряжение, при этом электрический ток индуцируется в прутьях «колеса», и ротор начинает вращаться как в асинхронном двигателе. Когда ротор достигает максимальной скорости, на катушки ротора подается напряжение. В результате полюс ротора и статора фиксируются, и начинается синхронное движение.
Электродвигатели широкого профиля
Разработка и выпуск синхронных двигателей – одно из направлений работы Калужского электромеханического завода (КЭМЗ) в составе концерна «Автоматика» Госкорпорации Ростех.
Двигатели из Калуги отличаются высокими коэффициентами мощности и полезного действия, повышенной надежностью и энергоэффективностью. Постоянная частота вращения в них поддерживается даже при большой механической нагрузке на вал. По сравнению с асинхронными двигателями устройства КЭМЗа имеют более широкий диапазон настроек частоты вращения, а также более выгодные массогабаритные характеристики.
 Фото: Агентство регионального развития Калужской области
Фото: Агентство регионального развития Калужской области
Именно компактные размеры и небольшой вес – до 3 кг – делают возможным в перспективе применение одной из последних разработок калужан в качестве двигателя для беспилотников вертолетного типа. Такой электродвигатель был представлен заводом Ростеха на форуме «Армия-2022». Двигатели КЭМЗа собраны полностью из российских комплектующих, что отвечает задачам импортозамещения.
Среди других направлений, в которых калужские синхронные двигатели уже зарекомендовали себя, − нефтегазовый сектор, промышленные системы вентиляции и кондиционирования, автотранспорт, ЖКХ. Для коммунальщиков инженеры КЭМЗа недавно представили новый синхронный электродвигатель для лифтов, выпускаемых Щербинским лифтостроительным заводом. Двигатель отличается тихим ходом и экономичным потреблением энергии.
О том, что калужские синхронные двигатели востребованы промышленностью, можно понять по цифрам производства. Так, в 2022 году КЭМЗ выпустил более 11 тысяч штук, нарастив объем с 2020 года примерно в два раза. В планах на текущий год – увеличить выпуск по некоторым моделям еще на 100%.