Какие явления используются в устройстве электродвигателей?
Электродвигатель — это электрическая машина, в которой электрическая энергия преобразуется в механическую энергию. Электродвигатель состоит из статора и ротора. В электродвигателе происходит электромагнитная индукция, выделение тепла при прохождении тока по обмоткам. Электродвигатель вращается за счёт взаимодействия магнитных солей обмоток статора и ротора во включённом состоянии. Электродвигатели бывают постоянного и переменного тока. В электродвигателе переменного тока электромагнитная индукция выражена более чётко. Вращающий момент электродвигателя пропорционален току якоря. Существуют разные способы подключения электродвигателя к питающей сети, а также использование его в качестве генератора. Впервые я ознакомился с электродвигателем в 10 классе школы.
Какое явление используется в устройстве электродвигателей?
Пожалуйста, войдите или зарегистрируйтесь для публикации ответа на этот вопрос.
решение вопроса
Связанных вопросов не найдено
- Все категории
- экономические 43,679
- гуманитарные 33,657
- юридические 17,917
- школьный раздел 612,491
- разное 16,911
Популярное на сайте:
Как быстро выучить стихотворение наизусть? Запоминание стихов является стандартным заданием во многих школах.
Как научится читать по диагонали? Скорость чтения зависит от скорости восприятия каждого отдельного слова в тексте.
Как быстро и эффективно исправить почерк? Люди часто предполагают, что каллиграфия и почерк являются синонимами, но это не так.
Как научится говорить грамотно и правильно? Общение на хорошем, уверенном и естественном русском языке является достижимой целью.
Принцип работы электродвигателя
Принцип работы электродвигателя основывается на эффекте обнаруженном Майклом Фарадеем еще в 1821 году. Он сделал открытие, что при взаимодействии электрического тока в проводнике и магнита, может возникнуть непрерывное вращение.
Принцип работы электродвигателя постоянного тока
Если в однородном магнитном поле расположить в вертикальном положении рамку и пропустить по ней ток, тогда вокруг проводника возникнет электромагнитное поле, которое будет взаимодействовать с полюсами магнитов. От одного рамка будет отталкиваться, а к другому притягиваться. В результате рамка повернется в горизонтальное положение, в котором будет нулевым воздействие магнитного поля на проводник. Для того что бы вращение продолжилось необходимо добавить еще одну рамку под углом или изменить направление тока в рамке в подходящий момент. На рисунке выше это делается при помощи двух полуколец, к которым примыкают контактные пластины от батарейки. В результате после совершения полуоборота меняется полярность и вращение продолжается.
В современных электродвигателях вместо постоянных магнитов для создания магнитного поля используются катушки индуктивности или электромагниты. Если разобрать любой мотор, то Вы увидите намотанные витки проволоки, покрытой изоляционным лаком. Эти витки и есть электромагнит или как их еще называют обмотка возбуждения.
Простыми словами о сложном
На самом деле там векторное произведение, дифференциалы и т.п. но это детали, а у нас упрощённый случай. И так…

Рис. 1 Основа работы электрического двигателя
Направление силы ампера определяется правилом левой руки.

Рис. 2 Правило левой руки
Мысленно ставим левую ладонь на верхний рисунок и получаем направление сил Ампера. Она типа растягивают рамку с током в том положении как нарисовано на рис.1. И никуда вертеться тут ничего не будет, рамка в равновесии, устойчивом.
А если рамка с током повернута по-другому, то вот что будет:

Рис. 3 Рамка
Здесь уже равновесия нет, сила Ампера разворачивает противоположные стенки так, что рамка начинает вращаться. Появляется механическое вращение. Это основа электрического двигателя, самая суть, дальше только детали.
Теперь что будет делать рамка с током на рис.3?. Если система идеальная, без трения, то очевидно будут колебания. Если трение присутствует, то колебания постепенно затухнут, рамка с током стабилизируется и станет как на рис.1.
Но нам нужно постоянное вращение и достичь его можно двумя принципиально разными способами и отсюда и возникает разница между двигателями постоянного и переменного трёхфазного тока.
Принцип работы электродвигателя постоянного тока
Способ 1. Смена направления тока в рамке.
Этот способ используется в двигателях постоянного тока и его потомках.
Наблюдаем за картинками. Пусть наш двигатель обесточен и рамка с током ориентирована как-то хаотично, вот так например:
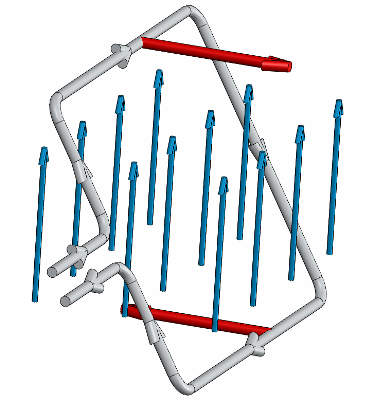
Рис. 4.1 Случайно расположенная рамка
На случайно расположенную рамку действует сила Ампера и она начинает вращаться.
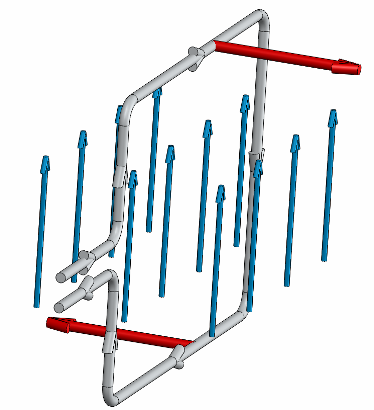
Рис. 4.2
В процессе движения рамка достигает угла 90°. Момент (момент пары сил или вращательный момент) максимальный.

Рис. 4.3
И вот рамка достигает положения, когда момента вращения нет. И если сейчас не отключить ток, то сила Ампера будет уже тормозить рамку и в конце полуоборота рамка остановится и начнёт вращение в противоположном направлении. Но нам ведь этого не надо.
Поэтому мы на рис.3 делаем хитрый ход – меняем направление тока в рамке.
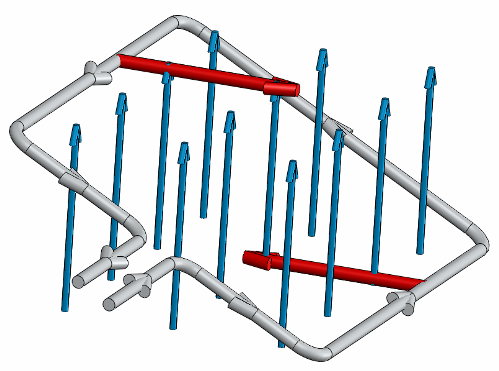
Рис. 4.4
И вот после пересечения этого положения, рамка с поменянным направлением тока уже не тормозится, а снова разгоняется.

Рис. 4.5
А когда рамка подходит к следующему положению равновесия, мы меняем ток ещё раз.
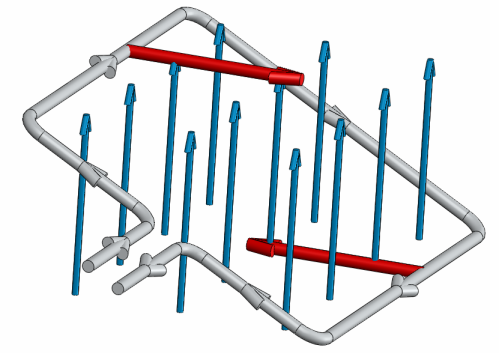
Рис. 4.6
И рамка опять продолжает ускоряться куда нам надо.
Вот так и получается постоянное вращение. Красиво? Красиво. Нужно только менять направление тока два раза за оборот и всего делов.
А делает это, т.е. обеспечивает смену тока специальный узел – щёточно-коллекторный узел. Принципиально он устроен так:

Рис. 5
Рисунок понятен и без пояснений. Рамка трётся то об один контакт, то об другой и так вот ток и меняется.
Очень важная особенность щёточно-коллекторного узла – его малый ресурс. Из-за трения. Например, вот движок ДПР-52-Н1 – минимальная наработка 1000 часов. В то же время срок службы современных бесколлекторных двигателей более 10000 часов, а двигателей переменного тока (там тоже нет ЩКУ) более 40000 часов.
Принцип работы электродвигателя переменного тока
Способ 2. Вращается магнитный поток, т.е. магнитное поле.
Вращающееся магнитное поле получают с помощью переменного трёхфазного тока. Вот есть статор.
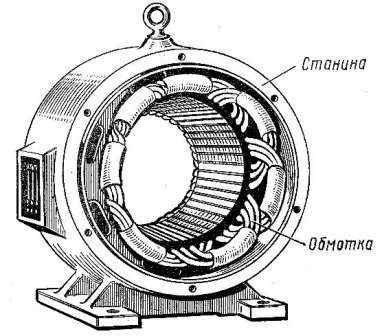
Рис. 6 Статор электродвигателя
А есть значит 3 фазы переменного тока.

Рис. 7
Между ними как видно на Рис. 7 120 градусов, электрических градусов.
Эти три фазы укладывают в статор специальным образом, чтобы они геометрически были повернуты друг к дружке на 120°.

Рис. 8
И тогда при подаче трёхфазного питания получается само собой за счёт складывания магнитных потоков от трёх обмоток вращающееся магнитное поле.
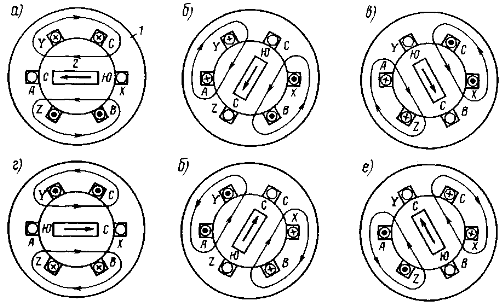
Рис. 9 Вращающееся магнитное поле
Далее вращающееся магнитное поле влияет силой Ампера на нашу рамку и она вращается.
Но здесь есть тоже различия, два разных способа.
Способ 2а. Рамка запитывается (синхронный двигатель).
Подаём значит на рамку напряжение (постоянное), рамка выставляется по магнитному полю. Помните рис.1 из самого начала? Вот так рамка и становится.
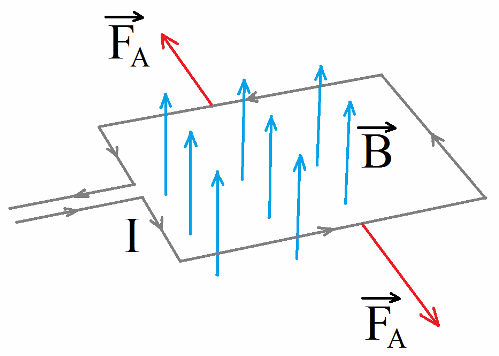
Рис. 10 (Рис.1)
Но поле магнитное у нас тут вращается, а не просто так висит. Рамка чего будет делать? Тоже будет вращаться, следуя за магнитным полем.
Они (рамка и поле) вращаются с одинаковой частотой, или синхронно, поэтому такие двигатели называются синхронными двигателями.
Способ 2б. Рамка не запитывается (асинхронный двигатель).
Фишка в том, что рамка не запитывается, совсем не запитывается. Просто проволока такая замкнутая.
Когда мы начинаем вращать магнитное поле, по законам электромагнетизма в рамке наводится ток. От этого тока и магнитного поля получается сила Ампера. Но сила Ампера будет возникать только если рамка движется относительно магнитного поля (известная история с опытами Ампера и его походами в соседнюю комнату).
Так что рамка всегда будет отставать от магнитного поля. А то, если она его вдруг почему-то догонит, то пропадёт наводка от поля, пропадёт ток, пропадёт сила Ампера и всё вообще пропадёт. То есть, в асинхронном двигателе рамка всегда отстаёт от поля и частота у них значит разная, то есть вращаются они асинхронно, поэтому и двигатель называется асинхронным.
Электродвигатели
В некоторых режимах работы электропривода электродвигатель осуществляет обратное преобразование энергии, то есть работает в режиме электрического генератора.
По виду создаваемого механического движения электродвигатели бывают вращающиеся, линейные и др. Под электродвигателем чаще всего подразумевается вращающий электродвигатель, так как он получил наибольшее применение.
Областью науки и техники изучающей электрические машины является — электромеханика. Принято считать, что ее история начинается с 1821 года, когда был создан первый электродвигатель М.Фарадея.
Конструкция электродвигателя
Основными компонентами вращающегося электродвигателя являются статор и ротор. Статор — неподвижная часть, ротор — вращающаяся часть.

У большей части электродвигателей ротор располагается внутри статора. Электродвигатели у которых ротор находится снаружи статора называются электродвигателями обращенного типа.
Принцип работы электродвигателя




-
Подробное описание принципа работы электродвигателей разных типов:
Классификация электродвигателей
- БДПТ
(Бесколлекторный двигатель + ЭП |+ ДПР) - ВРД
(Реактивный двигатель с ротором с явновыраженными полюсами и сосредоточенной обмоткой статора + ЭП |+ ДПР) - СДПМВ
- СДПМП
- Гибридный
- Указанная категория не представляет отдельный класс электродвигателей, так как устройства, входящие в рассматриваемую категорию (БДПТ, ВРД), являются комбинацией бесколлекторного двигателя, электрического преобразователя (инвертора) и, в некоторых случаях, — датчика положения ротора. В данных устройствах электрический преобразователь, в виду его невысокой сложности и небольших габаритов, обычно интегрирован в электродвигатель.
- Вентильный двигатель может быть определен как электрический двигатель, имеющий датчик положения ротора, управляющий полупроводниковым преобразователем, осуществляющим согласованную коммутацию обмотки якоря [5].
- Вентильный электродвигатель постоянного тока — электродвигатель постоянного тока, вентильное коммутирующее устройство которого представляет собой инвертор, управляемый либо по положению ротора, либо по фазе напряжения на обмотки якоря, либо по положению магнитного поля [1].
- Электродвигатели используемые в БДПТ и ВРД являются двигателями переменного тока, при этом за счет наличия в данных устройствах электрического преобразователя они подключаются к сети постоянного тока.
- Шаговый двигатель не является отдельным классом двигателя. Конструктивно он представляет из себя СДПМ, СРД или гибридный СРД-ПМ.
- КДПТ — коллекторный двигатель постоянного тока
- БДПТ — бесколлекторный двигатель постоянного тока
- ЭП — электрический преобразователь
- ДПР — датчик положения ротора
- ВРД — вентильный реактивный двигатель
- АДКР — асинхронный двигатель с короткозамкнутым ротором
- АДФР — асинхронный двигатель с фазным ротором
- СДОВ — синхронный двигатель с обмоткой возбуждения
- СДПМ — синхронный двигатель с постоянными магнитами
- СДПМП — синхронный двигатель c поверхностной установкой постоянных магнитов
- СДПМВ — синхронный двигатель со встроенными постоянными магнитами
- СРД — синхронный реактивный двигатель
- ПМ — постоянные магниты
- ЧП — частотный преобразователь
- где M – вращающий момент, Нм,
- F – сила, Н,
- r – радиус-вектор, м
- где Pном – номинальная мощность двигателя, Вт,
- nном — номинальная частота вращения, мин -1 [4]
- где P – мощность, Вт,
- A – работа, Дж,
- t — время, с
- где s – расстояние, м
- где
 – угол, рад,
– угол, рад, - где
 – углавая скорость, рад/с,
– углавая скорость, рад/с, - где
 – коэффициент полезного действия электродвигателя,
– коэффициент полезного действия электродвигателя, - P1 — подведенная мощность (электрическая), Вт,
- P2 — полезная мощность (механическая), Вт
- электрическими потерями — в виде тепла в результате нагрева проводников с током;
- магнитными потерями — потери на перемагничивание сердечника: потери на вихревые токи, на гистерезис и на магнитное последействие;
- механическими потерями — потери на трение в подшипниках, на вентиляцию, на щетках (при их наличии);
- дополнительными потерями — потери вызванные высшими гармониками магнитных полей, возникающих из-за зубчатого строения статора, ротора и наличия высших гармоник магнитодвижущей силы обмоток.
- где n — частота вращения электродвигателя, об/мин
- где J – момент инерции, кг∙м 2 ,
- m — масса, кг
- где
 – угловое ускорение, с -2 [2]
– угловое ускорение, с -2 [2] - где
 – постоянная времени, с
– постоянная времени, с
-
Включение обмотки
(многофазный)
(с контактными кольцами и щетками) —> 5 —>
Типы электродвигателей
Коллекторные электродвигатели
Коллекторная машина — вращающаяся электрическая машина, у которой хотя бы одна из обмоток, участвующих в основном процессе преобразования энергии, соединена с коллектором [1]. В коллекторном двигателе щеточно-коллекторный узел выполняет функцию датчика положения ротора и переключателя тока в обмотках.

Универсальный электродвигатель

Коллекторный электродвигатель постоянного тока
Бесколлекторные электродвигатели
У бесколлекторных электродвигателей могут быть контактные кольца с щетками, таким образом не надо путать бесколлекторные и бесщеточные электродвигатели.
Бесщеточная машина — вращающаяся электрическая машина, в которой все электрические связи обмоток, участвующих в основном процессе преобразования энергии, осуществляются без скользящих электрических контактов [1].
Асинхронный электродвигатель
Cинхронный электродвигатель
Специальные электродвигатели
Серводвигатель
Основные параметры электродвигателя
Момент электродвигателя
Вращающий момент (синонимы: вращательный момент, крутящий момент, момент силы) — векторная физическая величина, равная произведению радиус вектора, проведенного от оси вращения к точке приложения силы, на вектор этой силы.
 ,
,
 ,
,
Начальный пусковой момент — момент электродвигателя при пуске.
1 oz = 1/16 lb = 0,2780139 N (Н)
1 lb = 4,448222 N (Н)
момент измеряется в унция-сила на дюйм (oz∙in) или фунт-сила на дюйм (lb∙in)
1 oz∙in = 0,007062 Nm (Нм)
1 lb∙in = 0,112985 Nm (Нм)
Мощность электродвигателя
Мощность электродвигателя — это полезная механическая мощность на валу электродвигателя.
Механическая мощность
Мощность — физическая величина, показывающая какую работу механизм совершает в единицу времени.
 ,
,
Работа — скалярная физическая величина, равная произведению проекции силы на направление F и пути s, проходимого точкой приложения силы [2].
 ,
,
Для вращательного движения
 ,
,
 ,
,
Таким образом можно вычислить значение механической мощности на валу вращающегося электродвигателя

Коэффициент полезного действия электродвигателя
Коэффициент полезного действия (КПД) электродвигателя — характеристика эффективности машины в отношении преобразования электрической энергии в механическую.
 ,
,
-
При этом потери в электродвигатели обусловлены:
КПД электродвигателя может варьироваться от 10 до 99% в зависимости от типа и конструкции.
Международная электротехническая комиссия (International Electrotechnical Commission) определяет требования к эффективности электродвигателей. Согласно стандарту IEC 60034-31:2010 определено четыре класса эффективности для синхронных и асинхронных электродвигателей: IE1, IE2, IE3 и IE4.

Частота вращения

Момент инерции ротора
Момент инерции — скалярная физическая величина, являющаяся мерой инертности тела во вращательном движении вокруг оси, равна сумме произведений масс материальных точек на квадраты их расстояний от оси
 ,
,
1 oz∙in∙s 2 = 0,007062 kg∙m 2 (кг∙м 2 )
Момент инерции связан с моментом силы следующим соотношением
 ,
,
 ,
,
Номинальное напряжение
Номинальное напряжение (англ. rated voltage) — напряжение на которое спроектирована сеть или оборудование и к которому относят их рабочие характеристики [3].
Электрическая постоянная времени
Электрическая постоянная времени — это время, отсчитываемое с момента подачи постоянного напряжения на электродвигатель, за которое ток достигает уровня в 63,21% (1-1/e) от своего конечного значения.
 ,
,
Механическая характеристика
Механическая характеристика двигателя представляет собой графически выраженную зависимость частоты вращения вала от электромагнитного момента при неизменном напряжении питания.
Сравнение характеристик внешне коммутируемых электрических двигателей
Ниже представлены сравнительные характеристики внешне коммутируемых электродвигателей, в ракурсе применения в качестве тяговых электродвигателей в транспортных средствах.