Распознаём помехи от "настоящих" срабатываний радар-детектора

Очень давно ничего не писал в свой БЖ и блог. На сей раз будем учиться различать помехи от "настоящих" срабатываний радар-детектора, а также распишу на что может срабатывать ваш радар помимо засад ГИБДД. А также дам парочку рекомендаций, каким образом упростить задачу обнаружения камер.
Каким образом срабатывает ваш "антирадар" на камеры, а также от чего зависит дальность срабатывания я описывал в своей статье почему "поздно сработал мой радар-детектор?"
Но я кратенько напомню. Смотрим рисунок 1:
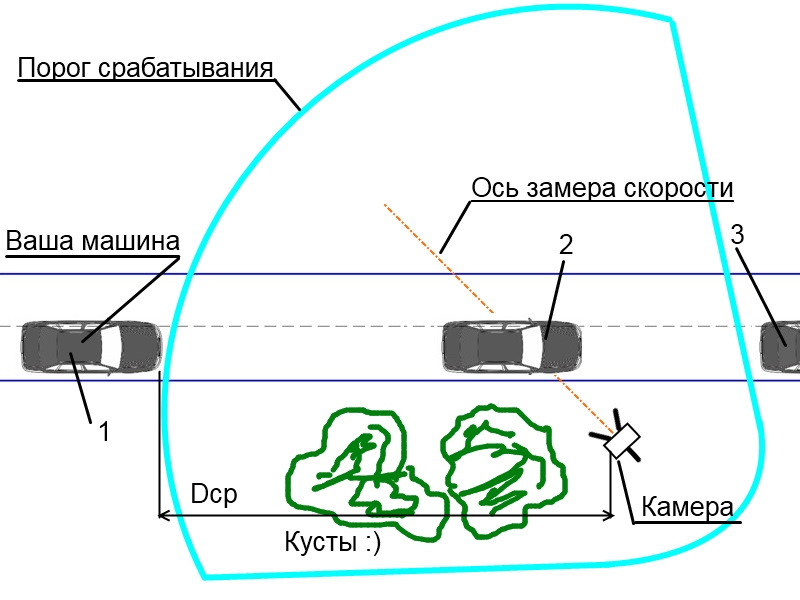 Рисунок 1 — Схема работы радар-детектора
Рисунок 1 — Схема работы радар-детектора
Вот некоторые определения, которыми будем оперировать в дальнейшем:
Порог срабатывания (голубая линия) — условная линия, пройдя через которую ваш радар-детектор начнёт подавать сигнал об опасности. Данная линия определяется мощностью радиоизлучения. Чем ближе к источнику радиосигнала, тем мощность сигнала будет выше, поэтому пройдя эту условную линию ваш "антирадар" подаст сигнал.
Dср — дальность срабатывания — расстояние, за которое до камеры ваш детектор сработает. Зависит от типа камеры, вашего детектора, а также от иных внешних факторов.
Ось замера скорости (рыжая штрихпунктирная линия) — ось, по которой камера замеряет скорость. В статье выше говорил о "точке замера скорости", но т.к смотрим на схему сверху, то тут уже говорим об оси замера.
Кусты будем считать радиопрозрачными, поэтому они для красоты 🙂
В поз.1 показана ваша машина, которая пересекает т.н. "порог срабатывания". Именно с этого момента ваш детектор подаст сигнал о приближающейся опасности. Чем ближе к камере (т.е к источнику радиоизлучения), тем интенсивнее будет подаваемый сигнал радар-детектором (конечно если он у вас оснащён данной функцией). Проезжая поз.2, камера замерит вашу скорость, и если она выше разрешённой как минимум на 21 км/ч, то вам придёт штраф. Минуя поз.3 ваш радар-детектор прекратит "пищать", т.к мощность радиосигнала упадёт ниже минимально улавливаемой вашим детектором, т.е проедете порог срабатывания.
А теперь перечислим самые распространённые источники радиопомех.
1. Датчики движения на автоматических раздвижных дверях супермаркета/АЗС и тд
Пожалуй самая распространённая и известная помеха, которая "мешает" правильно детектировать камеры и засады ГИБДД. Рассмотрим на примере проезда мимо какого-нибудь придорожного магазина (рисунок 2). Вместо него может быть АЗС, торговый центр, кафе и тд.
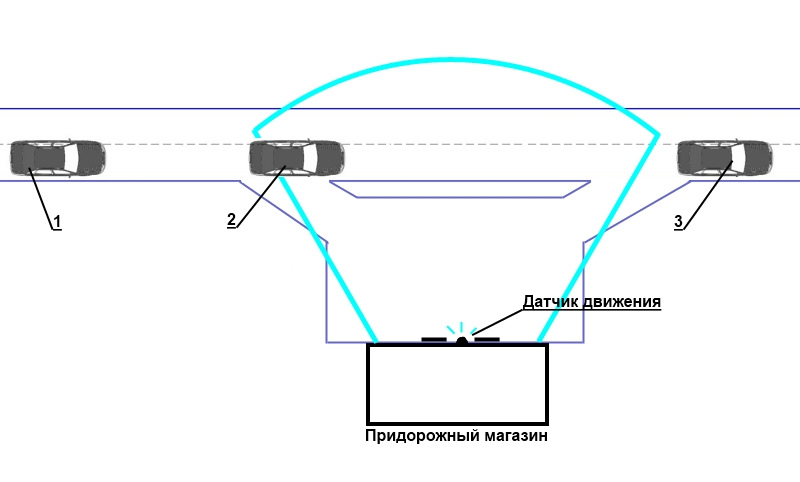 Рисунок 2 — Проезд мимо раздвижных дверей магазина
Рисунок 2 — Проезд мимо раздвижных дверей магазина
Вся проблема заключается в том, что данные заведения оснащаются до боли знакомыми автоматическими раздвижными дверьми. У данных дверей имеется датчик движения, который работает в том же частотном диапазоне, что и камеры ГИБДД (К-диапазон). Именно работа различных устройств на одной и той же частоте с камерами является причиной ложных срабатываний радар-детектора.
Взглянем на рисунок 2. В поз. 1 вы двигаетесь по трассе, приближаясь к придорожному супермаркету. В точке 2 вы пересекли порог срабатывания, и ваш "антирадар" подал ложный сигнал о наличии засады. Затем миновав "опасность" в виде магазина, в позиции 3 ваш детектор снова замолчал.
Мощность датчика движения небольшая, поэтому ваш "антирадар" может всего пару раз "пиликнуть" непосредственно рядом с магазином или АЗС. Как долго будет пищать, всё зависит от того, куда направлен выход из заведения. Если в сторону трассы (как показано на рисунке), то ваш детектор сработает уже непосредственно в момент проезда дверей, а если например направлены двери "навстречу" движения (как правило так на АЗС), то "запищать" ваш радар может метров за 200 до объекта. Это зависит от мощности вашего детектора, чем мощнее и чувствительнее, тем больше помех может ловить. Но многие модели могут хорошо "фильтровать" сигналы дверей.
Тут какой совет: если видите какие нибудь кафешки, заправку и тд, приготовьтесь к тому, что ваш радар может запищать.
2. Датчики "мертвых зон" на многих автомобилях, а также системы активного круиз-контроля
Это большой бич современной дорожной жизни, который значительно усложняет обнаружение засад. Многие владельцы подобных машин на трассе отключают функцию, но многие возможно не знают как отключить, а могут и не заморачиваются. Также не исключено наличие "идейного" водителя за рулём такой машины, специально ставящего помехи.
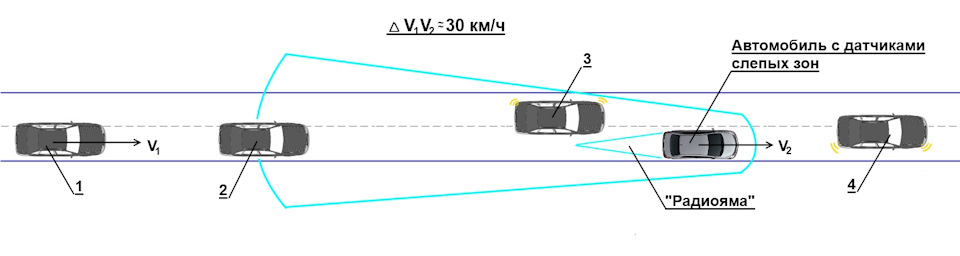 Рисунок 3 — Опережение машинами с датчиками слепых зон
Рисунок 3 — Опережение машинами с датчиками слепых зон
Конечно я не знаю, кому пришло в голову использовать один и тот же диапазон частот, что и у радаров ГИБДД, но примем это как есть (возможно это тайный агент из "цитадели зла водителя" 🙂 ) и рассмотрим данный случай:
Главная проблема тут заключается в том, что источник радиопомех движется в вашем направлении, и разница в скоростях вам неизвестна. Но примем в нашем примере разницу в 30 км/ч, Ваша скорость V1 разумеется выше (примем её равной 130 км/ч), чем у автомобиля-постановщика помех (V2=100 км/ч).
В поз.1 вы движетесь спокойно по трассе.
Приближаясь к постановщику помех (поз.2) ваш радар-детектор начал оповещать вас об "опасности". Естественно вы снизите скорость до "разрешённой +10…20 км/ч". И тут… сигнал может пропасть через некоторое время так и не обнаружив радар. Естественно приняв как ложное срабатывание вы начнёте ускоряться, и тут антирадар опять "как назло" начал "пищать". Вот тут в мозге может возникнуть "когнитивный диссонанс". Сбросив снова скорость ситуация повторится. Что стало причиной такой реакции вашего антирадара? А именно то, что источник сигнала… движется. Сбросив скорость, вы либо удалитесь от источника помех, либо дистанция станет постоянной, и причина пропажи сигнала может стать рельеф местности, поворот трассы и иные факторы. Обычно радар начинает "пищать", когда расстояние между вами и источником помех составит 500…700 метров. И пока вы не обгоните постановщик помех, ваш детектор так и будет сбивать вас с толку.
Как отличить?
1 — если источник радиоизлучения(т.е камера) неподвижен, то мощность сигнала ("пищания") детектора будет постоянно увеличиваться. Обычно дальность срабатывания варьируется от 100 метро до 1,5 километров в зависимости от её типа, расположения и внешних факторов.
2 — Если источник движется, то подаваемая мощность сигнала вашего детектора будет меняться хаотично в зависимости изменения вашей скорости, скорости постановщика помех и внешних факторов. Возможно пропадание или неравномерное нарастание сигнала.
3 — Если принять следующие допущения и:
а) вы проигнорировали сигнал вашего радар-детектора и продолжили двигаться с прежней скоростью;
б) постановщик помех движется с постоянной скоростью;
в) величины скорости примем указанные выше (V1=130 км/ч, V2=100 км/ч, разница скоростей соответственно 30 км/ч и она постоянна).
В данном случае имея разницу в скоростях 30 км/ч, вы только как минимум через минуту приблизитесь к источнику помех, проехав чуть больше 2х километров с Вашей скоростью 130 км/ч. В случае, если бы источник сигнала являлась камера, вы к ней приблизились значительно быстрее. В самом идеальном случае вы приблизитесь к камере через 40 сек при движении со скоростью 130 км/ч при условии, что детектор сработал за 1,5 км до камеры (идеальный случай). А если стоит например "Кордон" (или "Кречет"), то там и вовсе на реакцию отводится от 2 до 8 секунд!
Что делать?
1 — отыщите в потоке вероятный постановщик помех: любая премиум-машина (мерс, бэха или финик), или просто относительно дорогой кроссовер (например новый WV Toureg, даже новая мазда CX7 может ставить помехи). Как правило такие машины очень выделяются из потока.
2 — При помощи иных средств обнаружения убедитесь в отсутствии камер и засад. Для этого по возможности имейте в телефоне/навигаторе или ином устройстве независимую от детектора базу данных камер, желательно чтобы в неё могли добавлять мобильные засады (например яндекс навигатор). В крайнем случае глаз-алмаз никто не отменял)))) Ваш радар-детектор переведите в режим "город", пищать будет только уже в близости от постановщика помех. В данном случае толку от него никакого, т.к вы не сможете с помощью него отыскать засады. Но и отключать совсем не надо, ибо с помощью его вы поймёте момент опережения источника помех.
3 — совершите опережение/обгон постановщика помех, убедившись прежде всего в безопасности (!) своего манёвра. Приближаясь к поз.3 (рисунок 3) обратите внимание на то, что ваш детектор будет "разрываться". Таким образом вы убедитесь в том, кто является постановщиком помех. Совершив обгон (поз.4), ваш радар-детектор прекратить "выносить мозг" и вы продолжите дальнейшее движение с комфортом. Не забудьте его перевести в режим "трасса". Кстати если пристроиться сзади к постановщику помех, то можно попасть в "радиояму" )))) работает далеко не всегда, да и крайне не рекомендую прибегать к такому методу ввиду слишком малой дистанции, что чревато неприятными последствиями.
3 Датчики движения, установленные на электронных табло ограничения скорости
Впринципе это частный случай первого пункта. Данные табло используются на скоростных дорогах, например в некоторых местах МКАДа или М4 "Дон". Как правило, когда начинаешь к ним подъезжать, на расстоянии до 1 км в зависимости от внешних условий (рельеф, профиль дороги и тд) начинает срабатывать радар-детектор. Тут конечно рекоментация одна: снизить до разрешённых +20 (тем более на платных дорогах можно ездить до 130 без штрафа), т.к довольно часто на эти табло вешают камеры контроля скорости (особенно на МКАДе). На М4 "Дон" по имеющейся информации установлены датчики движения, по которых замеряется средняя скорость потока для дорожных служб. Но лично эту информацию не проверял, только слышал из уст людей, которые ездили под такими табло на платных участках со "штрафным" превышением (при этом их радар-детектор пищал. Если конечно знаете, что на данном табло камеры нет, то наздоровье ездите с комфортной для вас скоростью на этом участке дороги 🙂
4 Ваш телефон
Да-да)))) такое тоже может быть если вы свой телефон положите под ваш радар-детектор. Поэтому держите их порознь. Обратил на то, если я свой Айфон положу под "антирадар", то у меня он начинает периодически срабатывать на лазер.
5 Другой радар-детектор
Не знаю, с чем это связано, но иногда радар-детектор может срабавывать на своего "собрата", хотя данная помеха хорошо фильтруется.
6 Прочие помехи
Назову этот пункт банально 🙂 причиной срабатывания могут служить впринципе любые источники электромагнитных полей, частота которых может совпасть с диапазоном срабатывания радар-детектора (К-диапазон, Х-диапазон и др.), например линии ЛЭП, электроподстанции и др. Но сейчас алгоритм современных радар-детекторов разработан таким образом, что большинство сигналов от источников помех отсеивается. Основной проблемой до сих пор остались вышеперечисленные источники помех.
Обобщу сказанное:
1 — Дублируйте устройства. Источников помех становится всё больше, да и камер (а разные типы камер используют разный принцип работы) тоже к сожалению больше, поэтому рекомендую использовать принцип дублирования как в авиации))). Т.е помимо радар-детектора использовать независимо работающее устройство, которое работает по иному принципу, чем детектор. Даже если в вашем детекторе имеется GPS-база камер. Банально таким устройством может служить смартфон. Сейчас имеется множество приложений с базами данных камер ГИБДД. Например Яндекс-навигатор (не сочтите за рекламу 🙂 ) имеет подробную базу данных, которая довольно таки быстро обновляется + в нём можно устанавливать метки, т.е отмечать мобильные и новые стационарные засады. Дублирование позволяет обнаружить "засаду" при ложном срабатывании одного из устройств, продолжить обнаружение в случае отказа одного из устройств, а также более точно быть информированным (например знать не только о приближении к засаде, а знать точное местонахождение засады даже на незнакомой дороге).
2 — Помехи в основном возникают в К-диапазоне и Х-диапазоне. Те вещи, которые выше перечислил — это в основном К и Х диапазон. Это несколько упрощает детектирование Стрелки-СТ если ваш детектор "разделяет" простой К-диапазон и стрелочный. Помехи "стрелочного" сигнала разумеются возникают, причём источник помех как правило неизвестен. Но различить их легко: по моим наблюдениям помеха "стрелочного" сигнала коротка и возникает там, где Стрелки-СТ даже быть не может (в чистом поле или в дебрях-дебрячих). Если радар-детектор заточен под обнаружение Стрелки, то дальность срабатывания достигает до 1,5 км, что позволяет спокойно отрегулировать свою скорость движения. Х диапазон желательно вообще отключить, т.к эксплуатация радаров, использующих данный диапазон, прекращена.
3 — В городах используйте режим "город", или вообще лучше воздержаться от использования радар-детектора (пользоваться приложениями в мобилке или GPS-базы). Лично я в городе радар-детектор вообще не использую, или перевожу в такой режим, в котором он срабатывает только на стрелку (только в тех городах, где она используется). Пользуюсь яндексом. Да и вообще в городе лучше не превышать свыше "+20".
4 — дублировать свой радар-детектор другим радар-детектором не рекомендую. Первое, см. п.5 выше. Второе, принцип работы устройств един, а соответственно срабатывать будут примерно одинаково, даже если они разных фирм и разного ценового диапазона. Разница может быть лишь в разнице дальности срабатывания и количеству ложных срабатываний. Ну и третье, 2 подобных устройства будут загораживать обзор.
5 — перед снижением скорости или "внакате" убедиться в истинности сигнала. Не давить в пол тормоз, а иначе рискуете получить подсрачник 🙂
6 — используя доп.устройство или приложение в телефоне, имеющее функцию отметки мобильных засад, отмечайте их))) если раньше только моргали дальним, то теперь развитие технологий позволяет предупредить о засаде там, где отсутствует возможность или смысл предупреждать "встречку" по старинке)))
7 — ну и всё таки. Если превышаете, делайте это с умом 🙂 и не надо лихачить))
Ложные срабатывания радар-детектора
Приобрел радар-детектор с поддержкой кучи диапазонов в частности K и X.
Так вот, когда едешь и встречаешь сотрудника со спидганом, детектор подает сигнал. Другое дело когда детектор дает сигналы источник которых сложно даже предположить: в чистом поле, во дворе и т.п. Чаще всего сигналит диапазон K, но бывает и X.
Одно из предположений, что срабатывание происходит на передающий сигнал раций, которые некоторыми считаются более эффективным способом противостояния ГИБДД. Но на этом все. Фантазия кончилась.
Интересно где еще могут использоваться диапазоны спидганов, вопрос, ожидаемо, СПВ.
Ложные срабатывания радар-детектора: можно ли избавиться от них?

Если вас настолько замучили ложные срабатывания радар детектора, что вы готовы отправить прибор на свалку, советуем не горячиться. Да, это неудобно, ехать под непрекращающийся аккомпанемент пищащего антирадара, особенно, если вы слушаете музыку или в авто спит ребенок. Однако, где гарантия, что новый гаджет станет работать точнее? Давайте подробнее поговорим на эту тему, узнаем, почему, вообще, бывают ложные срабатывания!? Ну, и, выясним способы снизить их общий процент от основной массы реальных оповещений.
Причины ложных срабатываний
Попробуем на пальцах объяснить физику таких явлений. Итак, радар детекторы работают, как радиоприемники. Если выразиться точнее, они осуществляют эфирный перехват радиоволн полицейских радаров. Прибор в машине улавливает в установленном настройками диапазоне частот «левые» сигналы, и тут же оповещает водителя об угрозе. Последний снижает скорость, и гаишник остается «с носом».
Радары, которыми пользуются дорожные полицейские, работают с определенными частотными диапазонами. Самые распространенные сегодня – К и КА-диапазоны. Радар детекторы их знают, а потому обучены реагировать только на помехи из указанного спектра. Однако, никто не запрещает и другим устройствам работать на этих частотах.
Проблема в том, что в современном мире нас, буквально, пронизывают радиоволны. Со всех сторон встречаются высокочастотные устройства, изливающие в эфир свои электромагнитные вибрации.

- Например, установленные почти повсеместно датчики движения или объема (стоят в дверях магазинов, в шлагбаумах, пропускных пунктах и т.д.) тоже работают на частоте 24 ГГц, что входит в К-диапазон. Низко чувствительные радар детекторы «с радостью» срабатывают на их излучение, а водитель сталкивается с очередным ложным сигналом.
- В некоторых автомобилях стоят датчики безопасности, также функционирующие в К-диапазоне. Например, в авто марки Mercedes, выпущенных до 2018 года, в системе Distronic, в круизном контроле, в системе контроля слепых зон (в зеркалах) и т.д. Ложное срабатывание радар детектора происходит, если такой автомобиль попадает в радиус его действия (например, на встречной или попутной полосе движения).
- А еще, старые и дешевые детекторы иногда реагируют … друг на друга. Они, как бы, впадают в резонанс, и, словно обезумевшие, начинают верещать, непомерно раздражая водителей.

Получается, антирадар выдает помехи, потому что не распознает происхождение источника сигнала. Активирует ложное срабатывание, потому что фиксирует «чужие» радиоволны в своем эфире. При этом, не догадываясь, что большая их часть излучается вовсе не полицейским оборудованием.
- Есть еще одна причина ложных срабатываний – побочные волны на частотах, кратных установленным. Источниками часто являются стандартные рации, например, как у таксистов. К примеру, рабочая частота такой рации — 10 МГц. Основная доля электромагнитного излучения попадает в эфир на этой частоте. Однако, малая часть уходит на кратной ей – на 20 МГц. Еще меньшая доля – на 30 МГц и т.д. В итоге, маленький передатчик (рация) умудряется фонить на десятках радиочастот, создавая «левые» помехи. Если такая побочная радиоволна попадет в диапазон, на который настроен радар детектор, последний активирует очередную ложную тревогу.
Это были основные причины ложных срабатываний радар детектора. Далее, как и обещали, расскажем, как бороться с проблемой.

Как снизить число ложных срабатываний?
- Ну, во-первых, избавьтесь от морально устаревших гаджетов, которые без разбора реагируют на любое электромагнитное излучение. В первую очередь от тех, которые срабатывают на другие антирадары. В эту категорию входят и устройства из бюджетного ценового сегмента, особенно, азиатского происхождения (исключение – Корея, Япония). Поверьте, с ними больше мучений, чем кайфа.
- Как-то решить вопрос с датчиками в системах безопасности автомобилей — затруднительно. Однако, сами производители авто постепенно отходят от использования рабочих частот в К-диапазоне, переходя к более удобному Е-диапазону. В будущем, эта проблема должна решиться сама собой.
- «Научить» радар детектор не активировать ложное срабатывание на рации или датчики движения возможно, если использовать сигнатурный режим или сегментацию К-диапазона.

Сегментация – это отсечение части диапазонов, в которых совершенно точно не работает ни один полицейский радар или камера слежения.
Сигнатурный режим – сохранение в памяти радар детектора примеров сигналов — сигнатур, на которые реагировать нужно, и регулярное сканирование принятых радиоволн на соответствие записанным сигнатурам. Если обнаружится 90% совпадение – произойдет срабатывание оповещения. Если алгоритм модуляции не будет похож ни на один полицейский радар, значит сигнал ложный, пищать не надо.
Указанные две опции обязательно должны присутствовать на качественных радар детекторах. Разумеется, они стоят дороже бюджетных моделей, зато и ложных срабатываний у них гораздо меньше. Тут уже сам автовладелец должен сделать выбор: что ему важнее, постоянная комфортная езда с реальными оповещениями о засаде гаишников или дорожных камерах или разовое финансовое преимущество?
Почему срабатывает антирадар на свою сигнализацию
в принципе, антирадар, это всего лишь индикатор наличия сигналов, грубо говоря один сплошной чувствительный приемник. он ничего не генерирует и не излучает. так что никакой связи нет.так что скорее всего где-то ребятки нае.:censored. ошибаются и вводят в заблуждение
чтобы вывести электронику из строя надо будет мини РЛС на крышу поставить)
работа проезжающих мимо машин с антирадаром тоже ничего не сделает.
и по логике вещей правильней бы их было называть не антирадар, а радар-детектор. так как некоторые модели реагируют не только на радары, но и на любые похожие по частоте волны, например от радиостанций такси или дальнобойщиков.