Tech Journal

In this article, we will interface a DC motor with an Arduino UNO using TinkerCAD software. Simulating a circuit before implementing the circuit manually helps to visualize the connections and it also provides the output under different conditions and constraints which would help to cross-check the output of the circuit implemented manually.
What is Tinkercad?
Tinkercad is a free, easy-to-use app for 3D design, electronics, and coding. It’s used by teachers, kids, hobbyists, and designers to imagine, design, and make anything! Since it became available in 2011 it has become a popular platform for creating models for 3D printing, electronics simulation, coding as well as an entry-level introduction to constructive solid geometry in the schools.
Why we are using it?
We are using Tinkercad for saving money, learning & microcontroller coding. In this project, we have used the circuits facility of Tinkercad for simulating our project DC Motor Speed Control Using Arduino.
The DC motor speed in general is directly proportional to the supply voltage, so if reduce the voltage from 9 volts to 4.5 volts then our speed becomes half of what it originally had. But in practice, for changing the speed of a dc motor we cannot go on changing the supply voltage all the time. The speed controller PWM for a DC motor works by varying the average voltage supplied to the motor.
A list of components required to implement the circuit both manually and using TinkerCAD are given below
Hardware Requirements:
- Arduino — We can use any Arduino development board for this project whether it is UNO, MEGA, NANO etc.
- Motor — We have to use a DC motor for this project to see clear variations.
- Breadboard & wires — Use any normal breadboard & Jumper wires, Male-to-Female & Male-to-Male.
- Resistor — We will use a 220-ohm resistor in this project.
- Diode — We are going to use a diode to prevent reverse current otherwise it will going to damage our circuit.
- Transistor — We want an NPN BC-547 transistor in this project
Software Requirements:
- Tinkercad: Click Me
- Arduino IDE: Click Me
Note: Arduino IDE is optional you can code in Tinkercad also.
Code Description:
Let us learn the code to control the speed of the DC motor.
The Motor pin is set as 3 since we have used the 3rd pin of the PWM signal as the input to the DC motor.
We initialize two integer type variables viz., flag and speed.
void setup is a function and in this, we initiated the serial communication at the baud rate of 9600. Now, the motor pin is defined as the output, and we print the statement Enter value from 50 to 225. If the PWM value is less than 50 then the motor will not rotate due to less current.
Here, we check if the data is available in the serial port or not. If it is available then the data will be parsed into the integer format and will be stored in the speed variable. The Flag variable will be set to zero.
Circuit Design Stepper Motor Controller Tinkercad
 by Otosection
by Otosection

Circuit Design Stepper Motor Controller Tinkercad
Step into a realm of limitless possibilities with our blog. We understand that the online world can be overwhelming, with countless sources vying for your attention. That’s why we stand out by providing well-researched, high-quality content that educates and entertains. Our blog covers a diverse range of interests, ensuring that there’s something for everyone. From practical how-to guides to in-depth analyses and thought-provoking discussions, we’re committed to providing you with valuable information that resonates with your passions and keeps you informed. But our blog is more than just a collection of articles. It’s a community of like-minded individuals who come together to share thoughts, ideas, and experiences. We encourage you to engage with our content, leave comments, and connect with fellow readers who share your interests. Together, let’s embark on a quest for continuous learning and personal growth. For angular with Please description- include i section brackets code in cant in copy reply practice the codes
Circuit Design Speed Controlled Stepper Motor Circuit Tinkercad
Circuit Design Speed Controlled Stepper Motor Circuit Tinkercad Circuit design stepper motor control created by sibi.mc18 with tinkercad. Circuit design stepper motor created by aiyahnna jae toc with tinkercad. tinker ; gallery ; tinkercad is a free web app for 3d design, electronics, and coding. we.

Circuit Design Stepper Motor Controller Tinkercad
Circuit Design Stepper Motor Controller Tinkercad Circuit design stepper motor control created by ahmad alnano with tinkercad. Circuit design stepper motor control created by balasankar s v with tinkercad. Tinkercad | gallery of things. circuit design stepper motor control arduino created by fran joel with tinkercad. Please copy the code for practice in reply section i cant include codes with angular brackets in description.
Tinkercad Circuits 14 Stepper Motor With Motor Driver
Tinkercad Circuits 14 Stepper Motor With Motor Driver
please copy the code for practice in reply section i cant include codes with angular brackets in description how to wiring stepper motor 4 pairs and l293d in tinkercad v0.02, the 9v battery has been wire to stepper motor just for this video tutorial on tinkercad shows how to control a dc motor with arduino and l293d reading a rotary encoder connected to in this tutorial you will learn how to make a motor speed controller with arduino in tinkercad, motor speed controller with arduino in controlling the speed of the step motor using potentiometer. motor driver module with arduino using tinkercad (iot) this is part one of a three part video where i show and explain how to work on an online design program called «tinkercad» to hello guys, we are providing you all the robotics classes here we have uploaded the tinkercad introduction video. this is our first
Conclusion
Taking everything into consideration, there is no doubt that post offers valuable insights about Circuit Design Stepper Motor Controller Tinkercad. From start to finish, the writer illustrates a wealth of knowledge on the topic. In particular, the discussion of X stands out as a highlight. Thank you for taking the time to this article. If you need further information, please do not hesitate to reach out via the comments. I look forward to your feedback. Moreover, here are a few relevant content that you may find interesting:
How to use stepper motor in tinkercad?
How do you use a stepper motor with an Arduino interface?
The circuit Diagram for the arduino stepper motor control project is shown above. We have used the 28BYJ-48 Stepper motor and the ULN2003 Driver module. To energise the four coils of the stepper motor we are using the digital pins 8,9,10 and 11. The driver module is powered by the 5V pin of the Arduino Board.15 août 2017
How do you set up a stepper motor driver?
1. Step 1: Gather Parts. Partlist:
2. Step 2: Solder. Start the timer.
3. Step 3: Setting Up Power Supply.
4. Step 4: Wire Up Stepper.
5. Step 5: Upload Code to Arduino.
6. Step 6: Connect Everything on the Breadboard.
7. Step 7: Thunderbirds Are Go.
How does a stepper motor work?
How do you control the speed of a stepper motor?
A third method for stepper motor speed control is voltage regulation. By utilizing an LM555 timer, the current supplied will become a square wave. The “high” time of the signal will be when the rotor rotates. These three methods allow for the speed to be controlled in any number of applications.
What type of motor is a stepper motor?
DC synchronous motor
How can I speed up my Arduino stepper motor?
1. Use a higher voltage.
2. Set the current limit to the maximum allowed by your stepper motor.
3. Ramp the stepper speed up slowly.
4. Decrease the external load on the stepper.
What is NEMA 17 stepper motor?
NEMA 17 is a hybrid stepping motor with a 1.8° step angle (200 steps/revolution). Each phase draws 1.2 A at 4 V, allowing for a holding torque of 3.2 kg-cm. NEMA 17 Stepper motor is generally used in Printers, CNC machines and Laser Cutters.19 août 2019
What are the applications of stepper motor?
1. 3D printing equipment.
2. Textile machines.
3. Printing presses.
4. Gaming machines.
5. Medical imaging machinery.
6. Small robotics.
7. CNC milling machines.
8. Welding equipment.
Can stepper motors run continuously?
Stepper motors fall somewhere in between a regular DC motor and a servo motor. They have the advantage that they can be positioned accurately, moved forward or backwards one ‘step’ at a time, but they can also rotate continuously.20 déc. 2012
How do you drive a stepper motor without a driver?
How do you control a stepper motor with an a4988 driver?
1. Take a look at the datasheet for your stepper motor.
2. Put the driver into full-step mode by leaving the three microstep selection pins disconnected.
3. Hold the motor at a fixed position by not clocking the STEP input.
4. Measure the voltage (Vref) on the metal trimmer pot itself while you adjust it.
How long do stepper motors last?
The typical lifetime for a stepper motor is 10,000 operating hours. This approximates to 4.8 years; given the stepper motor operates one eight-hour shift per day. The lifetime of a stepper motor may vary in regards to user application and how rigorous the stepper motor is run.
Is a stepper motor AC or DC?
Drives for stepper motors can have inputs that are either ac or dc. … However, stepper motors themselves function as ac motors (they are generally considered to be asynchronous machines) because even a dc input is converted to a square wave to drive the individual motor windings.2 mar. 2018
Tinkercad для чайников. Часть 4. Создаем шестерни
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых статьях.
Отписаться от уведомлений вы всегда сможете в профиле автора.
Продолжаем рассматривать инструменты в онлайн-редакторе TinkerCad. Чтобы опять не возникало дискуссий – повторяю материал для начинающих и работа над ним вызвана именно возникающими, обращенными именно ко мне вопросами людей, о том, как же все-таки работать в Тинкеркад. Чувствую это все выльется в отдельный труд посвященный только Тинкеркаду.
Сегодня я рассмотрю вопрос об изготовлении шестеренок в Тинкеркад. Инструментов данного вида в нем несколько. Они позволяют изготавливать шестерни от простейших, до более-менее приличных. Сегодня рассмотрим самый ‘развитый’.
Различные критики пусть идут лесом по одной простой причине. Данный редактор рассчитан в первую очередь на работу с 3D-принтерам и не относится к профессиональным САПР системам. И люди его делавшие и модернизирующие ( вы же не скажете, что вы лучше разбираетесь в теме, чем ребята из Autodesk? 😉 ) считают, такой уровень достаточным.
Я тоже так считаю. И железным аргументом против «пиписькометров» можно привести фото шестерен напечатанных «гуру» на 3D-принтере.



Ребята! Слой 0,2! Z-wobbling. Какая эволвента? Вы о чем. Надо просто подходить ко всему с разумной достаточностью, как ребята из Autodesk.
Это блин не шестерни из КПП, которые вращаются с огромными обсек и испытывают нехилые нагрузки. Это всего лишь пластик и не надо равнять его с металлом. И точности тут более чем достаточно. Кстати вот пример:
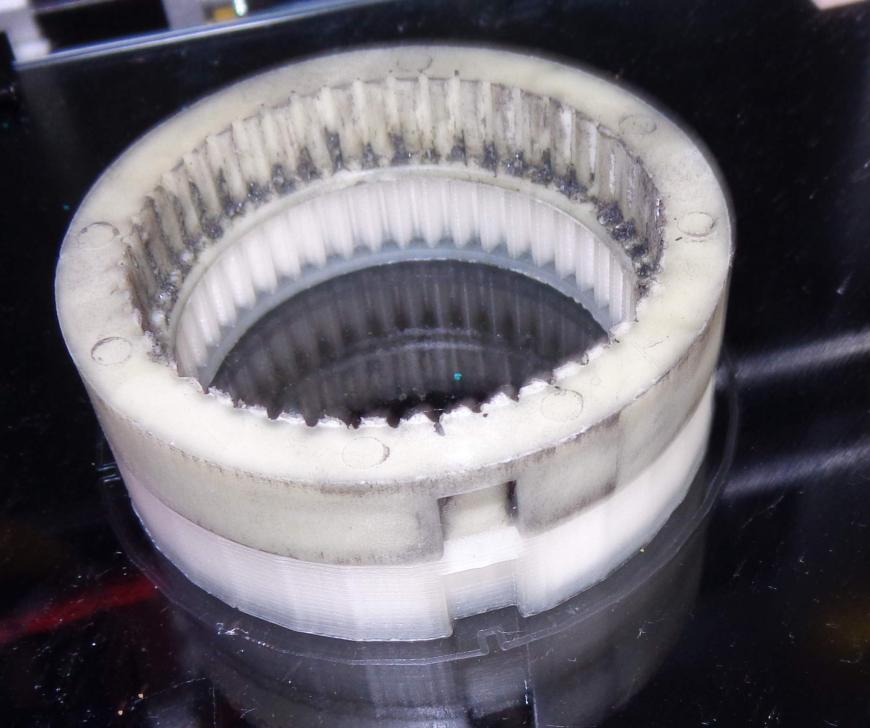
Шестерня редуктора стартера авто. Сделана в Тинкеркаде, тем инструментом, речь о котором пойдет ниже. Бегает уже 5 месяцев. Человек каждый день на авто – мотается по городу. В день с десяток раз пользуется стартером точно. Пока ноу проблем. Предыдущая китайская «фабричная» сдохла раньше.
Я не говорю, что Тинкеркад может все. Но большим количеством случаев, с которыми можно столкнуться в мелкой инжинерке, по печати копий оригинальных деталей он справится. А что еще надо новичку?
А если вы считаете, что этого недостаточно – профСАПР ваш выбор. Идите туда. Это знаете, как гуру С++ будет выступать перед учителем детей по Бейсику и кричать, что Бейсик Гэ, а учитель говорит банальности. Ну дк не слушай – иди свою шестерню со всеми параметрами черти в чем хочешь, чтобы на выходе получить из-за допусков принтера то же самое. Только тут это будет сделано чайником и быстрее.
Ладно это все лирика. Перейдем к теме.
Инструмент этот находится здесь:

Называется он Pro Gear by John Carter. Вытаскиваем готовый примитив.
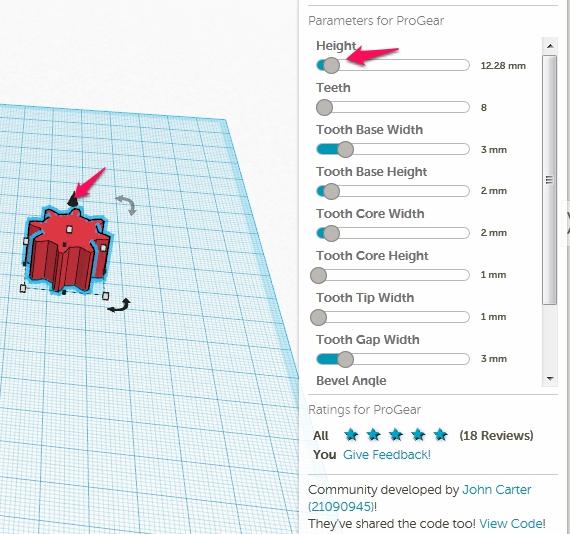
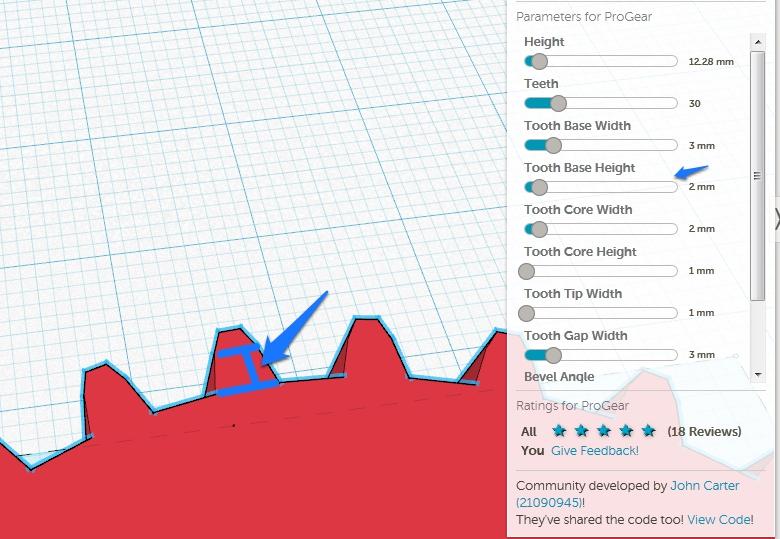
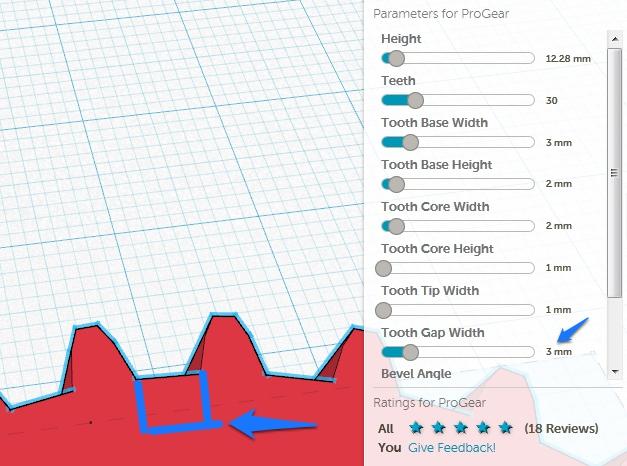
Tooth Gap Widht – ширина межзубового интервала
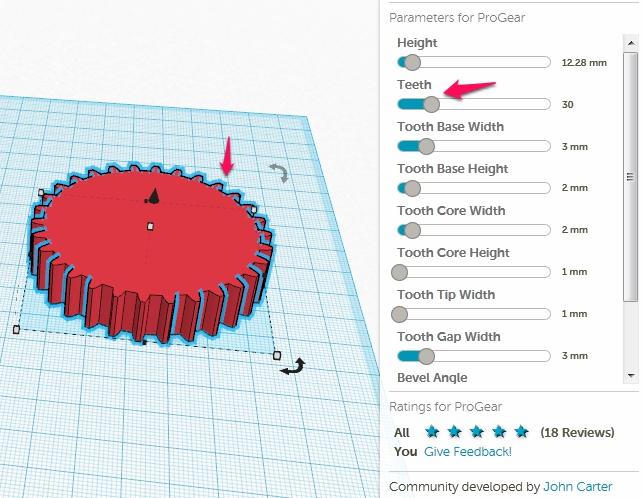
Почему такие нестандартные параметры? Потому, что при реверс-инжиниренге, когда мы не знаем параметры шестерни, можно измерить размеры зуба и задать их. Да будет несколько грубее. Но зато результата можно достигнуть с первого раза – смотрим выше про принцип разумной достаточности.
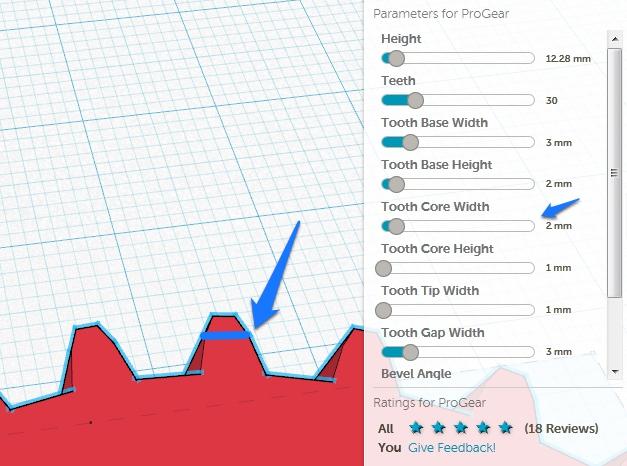
Так же в Тинкеркаде есть инструмент где параметры задаются более стандартным способом, но он более примитивен и поддерживает только одну форму зубьев. О нем позже.
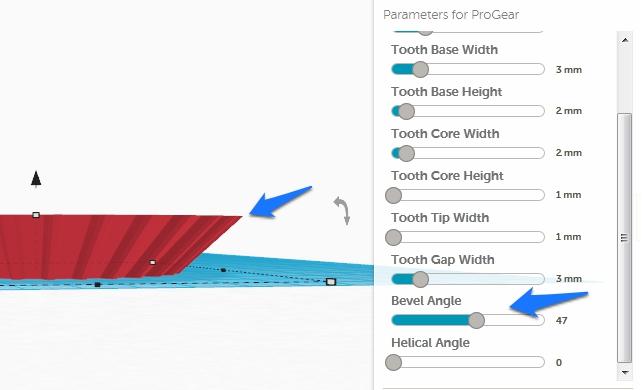
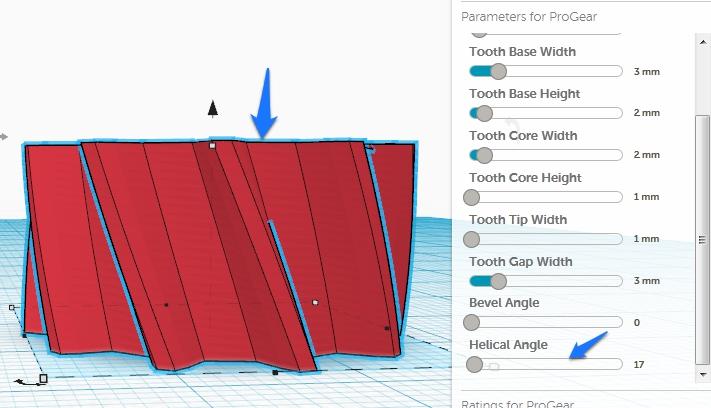
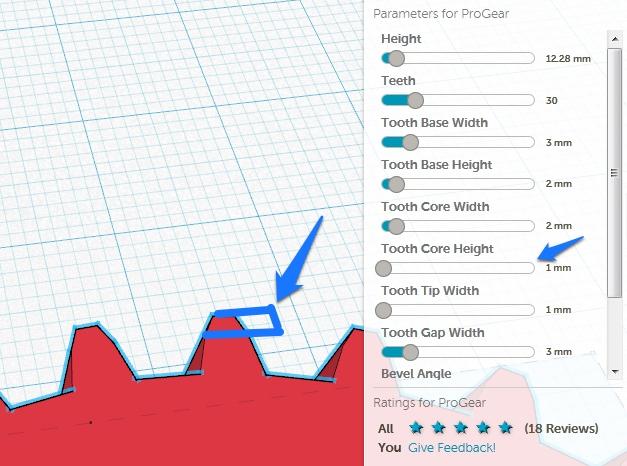
Helical Angle – угол наклона для косозубых шестерен.
По параметрам все.
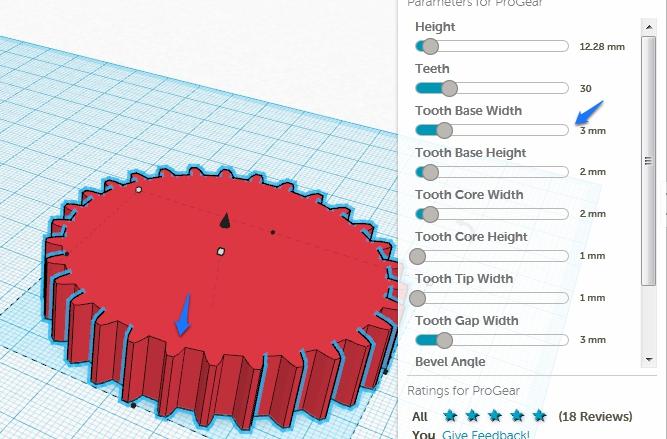
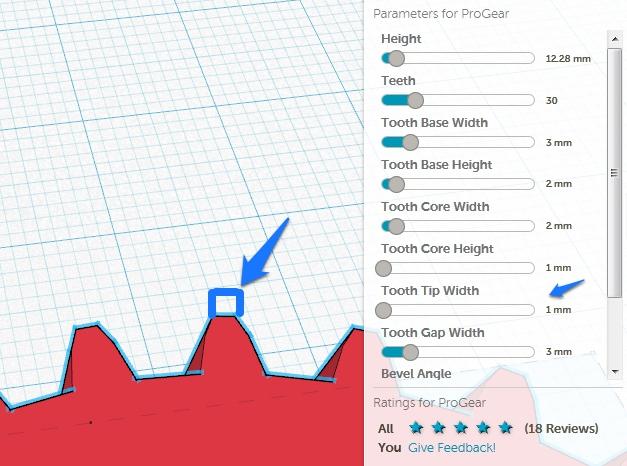
Вы скажете, а где же диаметр? Ну если мы правильно задали все параметры зубьев – у на и получится нужный результат. Если нет – можно взять за угол с зажатым Shift-ом (чтобы одновременно регулировать ширину и длину детали, а то можно и овальную сделать ))).
Меняем на нужный диаметр. И подгоняем нужную высоту.
На этом я думаю сегодня все. Больше в Рунете такой инфы на русском языке нет. Кто напишет лучше – буду рад.
Остальные критиканы – в сад…
Все удачи! Встретимся на 3DExpo!
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых статьях.