Число оборотов в минут (RPM) — что эта за характеристика и зачем она нужна?
У каждой физической величины есть единица измерения (и не одна). RPM (Rounds Per Minutes) — это единица измерения угловой скорости вращения. Ни в коем случае не характеристика. Такая единица должна равняться единице измерения угла делить на единицу измерения времени. (Градус, радиан, оборот) в (секунду, минуту, час, год). 1 RPM — это один полный оборот (360 градусов, 6,2832. радиан) за одну минуту (60 секунд, 1/60 часа). Применяется очень часто в технике и в быту. Скорость вращения дрели, шпинделя станка, барабана стиральной машины, грампластинки — принято измерять именно в RPM. 1 RPM = 360 град./мин. = 60 RPH = 1/60 RPS = 6,2832. рад./с
Число оборотов в минуту (RPM) — это величина, равная числу оборотов вокруг своей оси какого-либо вращающегося механизма, части какого-либо механизма за единицу времени, равную одной минуте. Наиболее часто числом оборотов в минуту характеризуется вращение поворотного стола (turntable) проигрывателя виниловых пластинок, где существуют стандартные скорости вращения (приблизительно 33, 45, 78 оборотов в минуту), вращение коленчатого вала у автомобилей, частота вращения которого определяется специальным прибором — тахометром, частота вращения вала любого электродвигателя, когда эта величина важна для работы всего механизма, в котором он задействован, и эту величину необходимо точно отстраивать. В более глобальных масштабах — наша планета тоже имеет определённую частоту вращения вокруг своей оси, равную 1/1440 от оборота в минуту (то есть совершает один оборот вокруг своей оси за 24 часа). В некоторых механизмах и системах частота вращения в минуту важна в большей степени, в некоторых — в меньшей, но в конечном итоге изменение этой величины приводит к изменению параметров работы всей системы в целом, а в случае с планетами — даже в планетарном масштабе.
Про фазу впрыска (for dummies)

Что-то сегодня день не задался, болит голова и нет никакого желания думать о чем-то "сложном". Но чтобы не терять вечер зазря смотря телевизор решил сделать небольшую статью про фазу впрыска.
Как обычно оговорюсь — статья для начинающих, кто считает себя продвинутым в этом деле, тем можно не читать, никаких сюрпризов или ноу-хау Вы тут не найдете. Просто постараюсь на пальцах и простому( для новичков), пояснить что такое фаза впрыска и что такое лить "в открытый клапан" или "в закрытый клапан".
Ну для начала советую посмотреть картинку от фирмы SMS
 almisoft.ru/j5olt.htm
almisoft.ru/j5olt.htm
( almisoft.ru/j5olt.htm)
Посмотрели ?
Хорошо.
Теперь забудьте ее. Я сам каждый раз смотрю на таких картинки и начинаю путаться, ломать мозг и впадаю в некий ступор. Нет, конечно кому-то картинка кажется ясной и понятной, но мой мозг на ней все равно зависает. Хотя опять же — там все правильно. правильно, но по дурацки и обычным людям все это кажется каким-то необъяснимым бредом и абстракцией. Кто не согласен, тот может дальше не читать. 🙂
Начнем с простого.
Если открыть любой учебник по ДВС или любую статью, то везде можно увидеть примерно одну и ту же картинку, состоящую из 4 тактов стандартного двигателя.
(сразу оговорюсь, я не люблю использовать чужие материалы, поэтому все нижележащие картинки рисовал сам, как умею. да простят меня дизайнеры, верстальщики и художники)
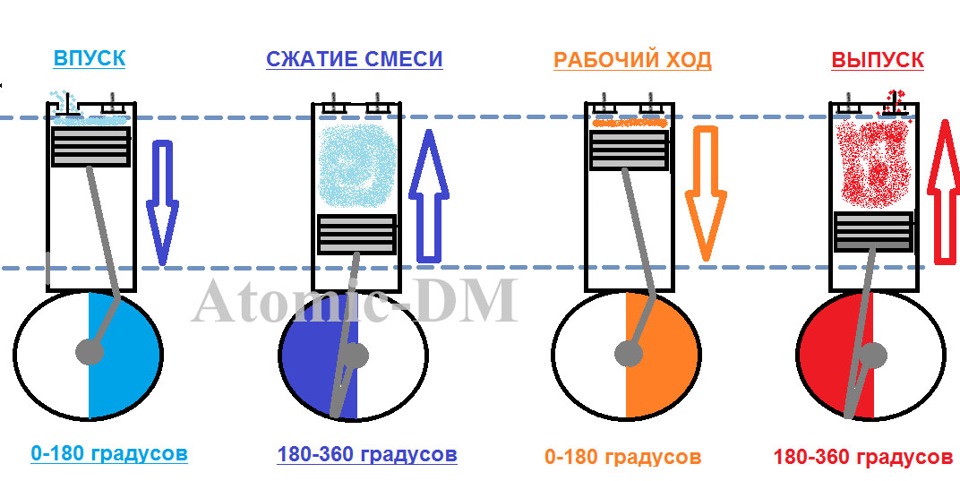 такты двигателя
такты двигателя
Все процессы в двигателе состоят из 4 тактов.
1. впуск . т.е. тот момент когда идет всасывание в цилиндр бензино-воздушной смеси. Естественно за это время коленвал проходит пол оборота. т.е. от 0 до 180 градусов(НМТ нижняя мертвая точка). дальше начинается такт сжатия
2. такт сжатия. под конец этого такта недалеко до ВМТ(верхней мертвой точки) смесь поджигается и на 360 градусах начинается такт расширения
3. смесь горит давя на поршень с силой и тем самым поршень крутит коленвал. Короче говоря это тот так что придает сил вашему авто. идет от 0 до 180 градусов. (от ВМТ до НМТ)
4. далее идет такт выпуска. т.е. поршень идет вверх и выталкивает сгоревшие пары смеси в выпускной клапан.
ну а далее все повторяется. ничего сложного.
Ну а теперь сделаем некоторую рокировку. Давайте такт впуска и сжатия перенесем в правую часть.
Получаем картинку
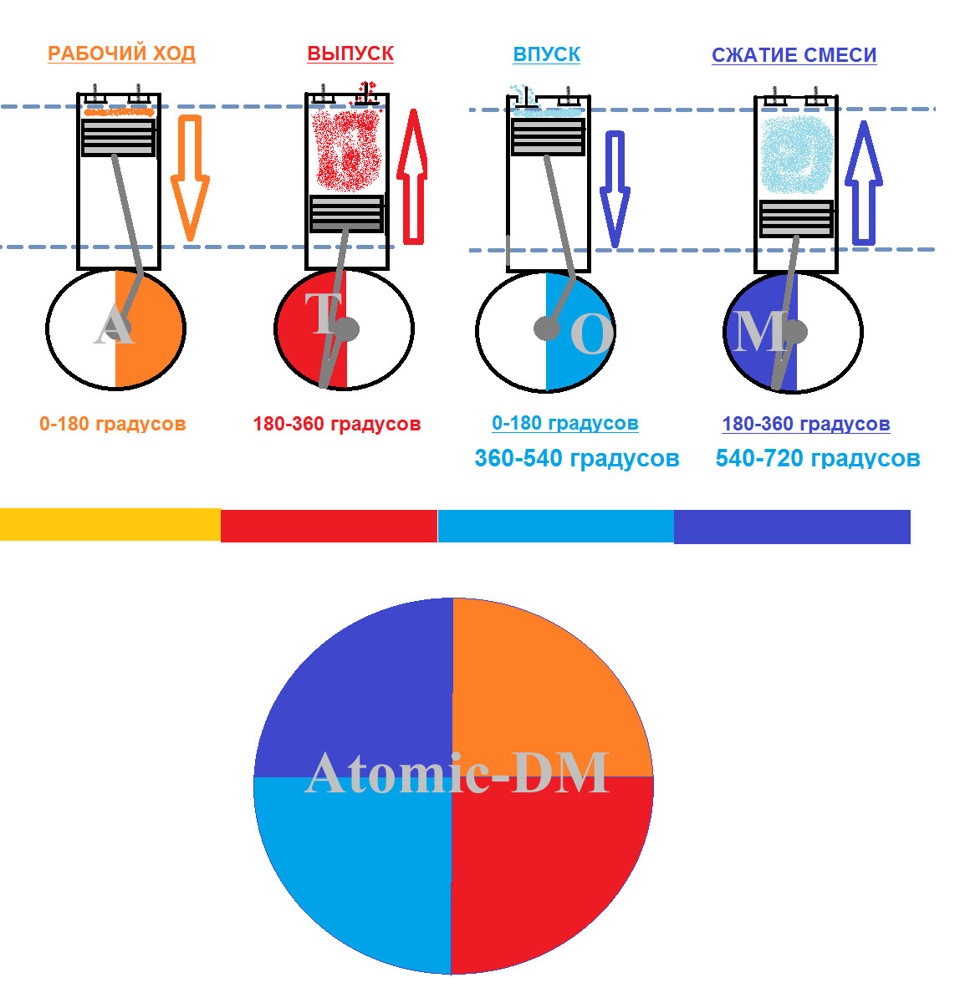
теперь будем считать так
0-180 градусов это такт рабочего хода
180-360 это такт выпуска
далее мы берем не 0 градусов, а продолжаем отсчет.
360-540 это такт впуска
540-720 это такт сжатия.
вот и получилось что все такты проходят за 720 градусов положения коленвала.
Рисуем круг. чертим одну горизонтальную и одну вертикальную линию. Подписываем крайние точки.
получаем вот такую картинку
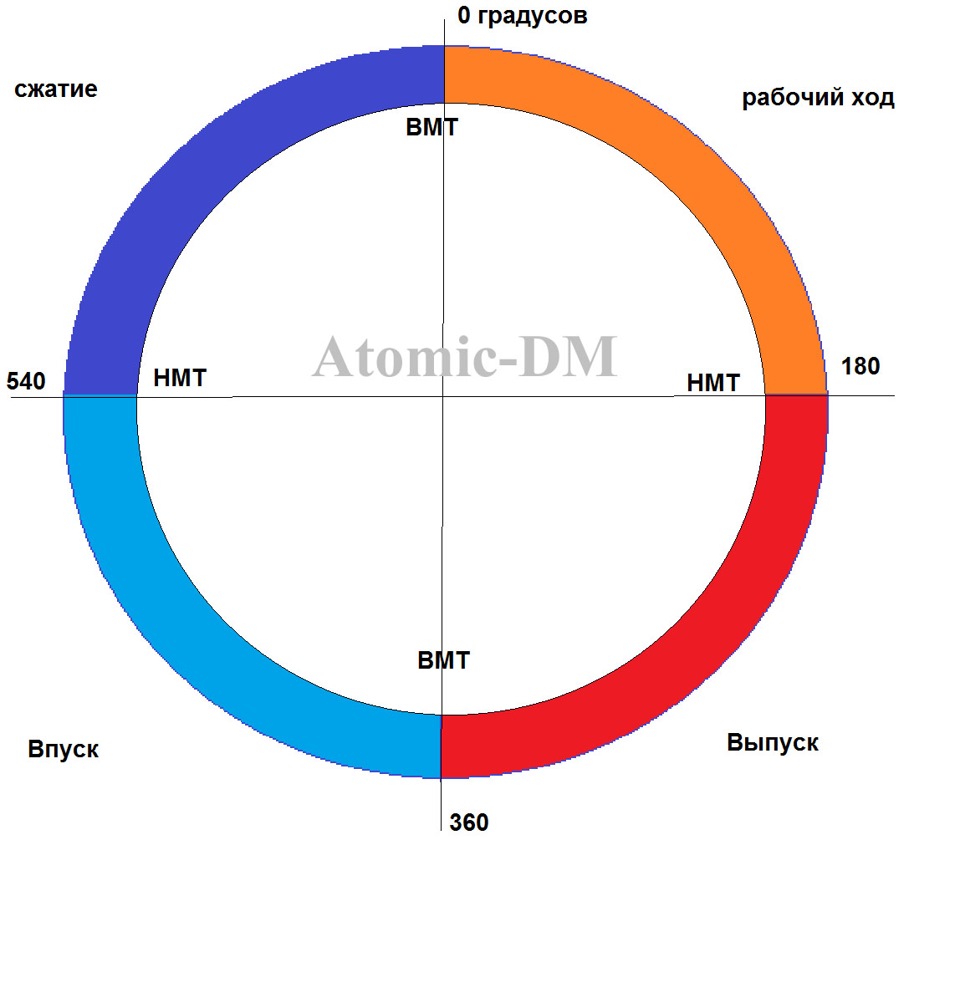
Далее больше всего нас интересует нижняя часть этого круга. А именно такт выпуска и такт впуска. Как многие знают, при выпуске открыт выпускной клапан, а при впуске открыт впускной клапан. Давайте рассмотрим подробнее. Для примера я взял параметры валов которые стоят по умолчанию в моей программе. Я не помню точно, но вроде эти параметры относятся к стандартным валам 2112.
Вот данные
Открытие Впускного до ВМТ=32
Закрытие Впускного после НМТ=74
Открытие Выпускного до НМТ=74
Закрытие Выпускного после ВМТ=32
Давайте попробуем нарисовать это на схеме. Начнем с выпускного.
Открытие Выпускного до НМТ=74
Закрытие Выпускного после ВМТ=32
Так как это данные выпускного вала, то НМТ и ВМТ должны быть в районе такте выпуска. А значит НМТ в нашей картинке это та что стоит на 180 градусах. Читаем до НМТ=74". Т.е. отсчитываем от НМТ против часовой стрелки 74 градуса и ставим точку. Это начало открытия выпускного клапана. Тоже самое делаем с окончанием. Закрытие "после ВМТ=32" смотрим на ВМТ . она у нас 360. отсчитываем после ВМТ 32 градуса. ставим точку. Вот это и есть открытие нашего выпускного клапана на диаграмме. (пометил розовым цветом)
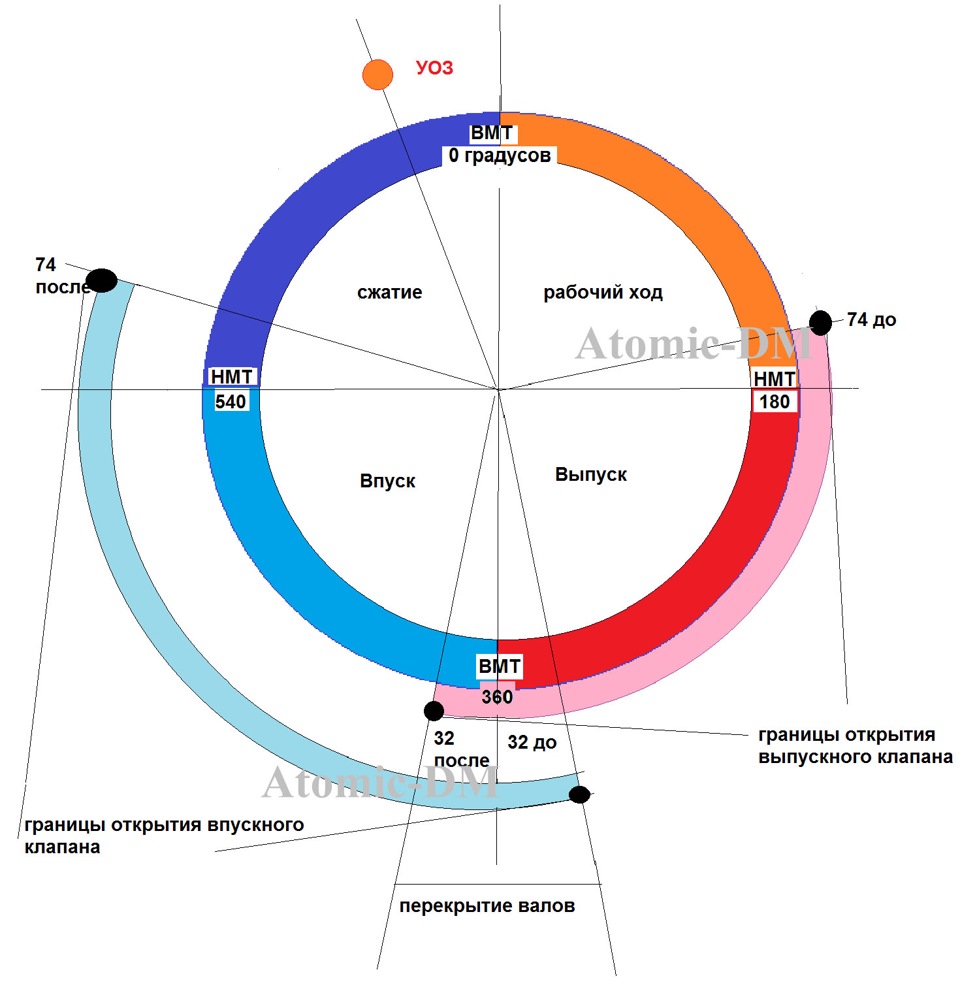
Тоже самое делаем для впускного клапана.
Открытие Впускного до ВМТ=32
Закрытие Впускного после НМТ=74
т.е. открывается он за 32 градуса до ВМТ. т.е. 360-32.
закрывается на 74 после НМТ . т.е. 540+74
Нарисовали. на моей картинке это нарисовано голубым.
Как видим из картинки, впускной клапан у нас открывается тогда когда выпускной еще открыт. Этим достигается наилучшая вентиляция цилиндра. Это же место называется перекрытием валов. т.е. когда оба клапана открыты одновременно. Разные валы имеют разную эту зону. Но об этом лучше кто-нибудь другой раскажет.
Так же на картинке я показал где находится момент поджига. УОЗ (угол опережения зажигания) находится недалеко от ВМТ. Про уоз тоже можно долго разговаривать и это не входит в данную статью.
Ну раз мы разобрались что такое впуск, выпуск и поняли когда открываются клапана, пришло время разобраться в впрыском бензина.
Существуют два метода впрыска.
1. в закрытый клапан
Это тогда когда вся смесь впрыскивается форсункой в впускной коллектор в тот момент когда впускной клапан еще закрыт. Потом клапан открывается и уже перемешанная смесь попадает в цилиндр.
2. в открытый клапан.
Т.е. форсунка впрыскивает бензин в тот момент когда клапан уже открыт. Задача успеть впрыснуть до того как клапан закроется.
( В некоторых программах есть еще "комбинированный метод", т.е. когда форсунка начинает лить в закрытый клапан, а заканчивает в открытый. )

Стоит учитывать что время впрыска на малых оборотах относительно не большое, но на больших оборотах длительность впрыска значительно больше чем время открытия клапана. поэтому в определенный момент лить в открытый или закрытый уже не имеет смысла. форсунка льет уже в оба положения. Так что фаза впрыска и тем более метод (открытый и закрытый) важны только для тех режимах где время впрыска не велико. т.е. обороты двигателя не особо большие.
В общем учитывая все это становится понятно что на разных оборотах фаза впрыска своя.
Многие программы (моя в том числе) умеют строить фазу впрыска автоматом, анализируя время впрыска, обороты и другие параметры.
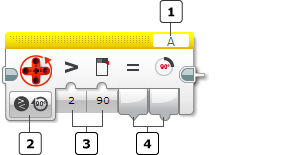
Блок вращения мотора
Блок вращения мотора получает данные от датчика вращения мотора, встроенного в средний мотор, большой мотор и NXT моторы. Вы можете измерить, насколько повернулся мотор в градусах или оборотах. Кроме того, вы можете узнать текущий уровень мощности мотора.
Блок вращения мотора может также сравнить количество вращений или уровень мощности с пороговым значением и получить логический вывод (истина или ложь).
См. «Использование датчика вращения мотора» для получения более подробной информации о работе датчика вращения мотора, данных, которые он предоставляет, и программных примерах.
 Выбор порта
Выбор порта
 Выбор режима
Выбор режима
 Вводы
Вводы
 Выводы
Выводы
Используйте «Выбор порта» в верхней части блока для выбора порта мотора модуля EV3 (A, B, C или D), к которому подсоединен мотор, который вы хотите измерить. Блок вращения мотора работает как датчик, но для его использования мотор должен быть подсоединен к порту мотора. Его нельзя использовать с портом датчика.
Используйте «Выбор режима» для выбора режима блока. Доступные вводы и выводы будут меняться в зависимости от режима.

В режиме «Измерение – Градусы» в выводе «Градусы» выдаются данные о текущем количестве вращений мотора. Вращение мотора измеряется в градусах относительно состояния после выполнения последнего сброса в режиме «Сброс».

В режиме «Измерение – Обороты» в выводе «Обороты» выдаются данные о текущем количестве вращений мотора. Вращение мотора измеряется в оборотах относительно состояния после выполнения последнего сброса в режиме «Сброс».

В режиме «Измерение – Текущая мощность» в выводе «Текущая мощность» выдаются данные о текущем уровне мощности мотора.
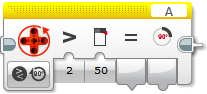
В режимах сравнения данные датчика (градусы, обороты или уровень мощности) сравниваются с пороговым значением, используя выбранный тип сравнения. Истинный/ложный результат отображается в окне «Результат сравнения», а данные датчика отображаются в выбранном типе данных датчика.

В режиме «Сброс» количество оборотов сбрасывается на ноль (0 градусов или оборотов). Дальнейшие измерения количества оборотов мотора с использованием датчика вращения мотора будут выполняться от точки сброса.
Сброс датчика вращения мотора не влияет на уровень мощности или положение мотора. Это влияет только на показания датчика вращения мотора.
Управление движением робота
В общем случае робот может передвигаться прямолинейно и по ломанной траектории. Вычислить передвижение робота на необходимое расстояние по прямой достаточно просто. Для этого должен быть известен диаметр колеса робота. Исходя из этих начальных условий можно вычислить точное количество оборотов колеса, необходимое для преодоления заданного расстояния.
Робот за 3 минуты
Зная количество оборотов мотора робота в минуту можно вычислить время, за которое робот преодолеет нужное расстояние.
Для робота Lego EV3 количество оборотов большого мотора составляет 160 – 170 оборотов в минуту.
Поэтому вычисление времени будет приблизительным т.к. у каждого мотора количество оборотов в минуту может быть разным.
Ломанная траектория представляет из себя комбинацию из прямолинейных и криволинейных участков. Криволинейные участки можно вычислять, используя формулу вычисления длины окружности.
Расчет числа оборотов
Для того, чтобы рассчитать количество оборотов колеса для движения на заданное расстояние по прямой нужно использовать длину окружности колеса. Она вычисляется по формуле L = π * d. Где π – число Пи, равное 3,14, а d –диаметр колеса. Для базового набора Lego EV3 диаметр колеса составляет 56 мм.
Пусть робот EV3 оснащен двумя передними колесами и шаровой опорой сзади и должен проехать 1 метр. За один оборот колеса робот преодолевает расстояние L = π * d = 3.14 * 56 = 175,84 мм. Пусть n – количество оборотов, k – заданное расстояние. Тогда количество оборотов n = k / L =>
n = 1000 мм / 175,84 мм = 5,69 оборотов.
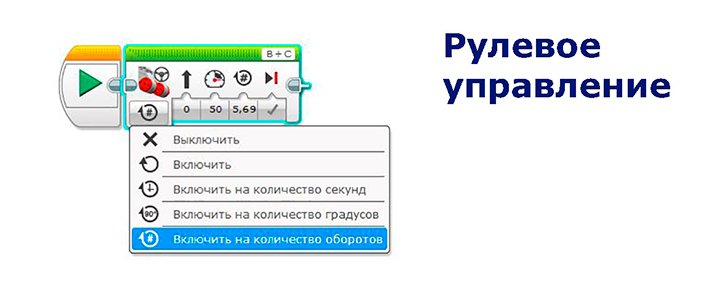
Программа для Lego EV3 для движения робота на заданное количество оборотов.
- Во вкладке «Движение» выбираю блок «Рулевое управление».
Устанавливаю режим «Включить на количество оборотов», «Рулевое управление» установлено в 0 – это означает движение по прямой линии. Большие моторы установлены в порты B и C.
рулевое управление движение по прямой на один метр
Скорость движения моторов – 50 условных единиц. Значение оборотов ставлю вычисленное выше. Тормозить в конце – значение «Истина». При нажатии на блок «Начало» робот Lego EV3 проедет по прямой 1 метр со скоростью 50 у.е. и остановиться.
- При втором способе используется блок «Независимое управление моторами».
Все настройки блока такие же, как и настройки у блока «Рулевое управление». Для того чтобы робот ехал по прямой необходимо скорость моторов установить одинаковой.
В общем случае робот может передвигаться по траектории, которая представляет из себя окружность, часть окружности и комбинации различных частей окружности. При этом робот может:
- Разворачиваться на месте – колеса робота крутятся в разные стороны с одинаковой скоростью;
- Разворачиваться вокруг одного колеса – одно колесо машинки Lego EV3 стоит на месте, другое крутится с заданной скоростью;
- Описывать произвольную окружность – оба колеса крутятся в одном направлении с разной скоростью.
Пусть параметры тележки EV3 будут такими: робот представляет из себя платформу с двумя колесами и шаровой опорой, расположенной сзади. Тележка симметрична и расстояние между центральными осями колес и шаровой опорой является равнобедренным треугольником.

робот тележка лего
Для упрощения расчетов, задам расстояние между центрами колес по оси, но которой они расположены равным 20 см. На многих соревнованиях по робототехнике одним из условий являются габариты робота. Например, нужно чтобы размеры робота были не более 20 см в ширину, 20 см в длину и 20 см в высоту.
Если робот не подходит по габаритам, то его не допускают к соревнованиям. Диаметр колеса 0,56 см – это стандартный размер колеса из базового набора Lego EV3. Левый большой мотор подключен к порту В, правый к порту С. Теперь вычислим количество оборотов колеса для каждого случая и для разворота робота Lego EV3 на определенный угол.
Расчеты применимы для роботов, собранных на базе любых конструкторов. Разница будет заключаться только в среде программирования, т.к. у разных робототехнических наборов разные программные обеспечения. Но принцип расчета везде одинаковый.
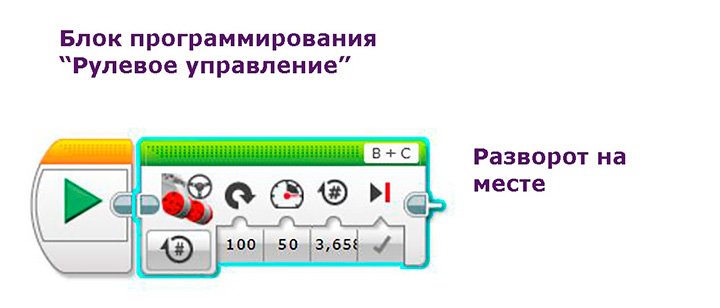
Разворот на месте
- Разворот робота на 360 градусов
В этом случае нужно чтобы у робота колеса вращались в разных направлениях с одинаковой скоростью. Для того чтобы робот совершил полный разворот вычислим необходимую длину окружности. Разворот будет на месте, поэтому диаметр между осями будет равен 20 см =>
Длина описываемой окружности будет равна
L = π * d = 3.14 * 0,2 м = 0,628 метра
Количество оборотов будет равно пройденному расстоянию L деленному на длину окружности колеса n = Lокр / L колеса, где длина окружности колеса равна L = π * d = 3.14 * 56 = 175,84 мм = 0,176 м.
А значит количество оборотов для разворота на 360° будет равно
n = L окр / L колеса = 0,628 / 0,176 = 3,568 оборота.
Для блока программирования «Рулевое управление» можно задать разворот на 100 условных единиц (или — 100), что означает разворот на месте. Скорость 50 у.е. и 3,568 оборота.
разворот робота на месте рулевое управление
Для блока программирования «Независимое управление моторами» просто скорость одного мотора ставим 50 у.е., а другого – 50 у.е. При этом количество оборотов колес остается 3,568.
- Для того, чтобы повернуть робота тележку Lego EV3 на произвольное количество градусов нужно составить пропорцию, где нужное количество градусов нужно разделить на 360 градусов и учесть эту пропорцию в расчете.
Например, для разворота на 180 градусов. Обозначим нужную длину части окружности L1 =>
L1 = L * (нужное к-во градусов / 360 градусов) = L * (180 / 360) = L / 2 = 0,628 / 2 = 0,314, а значит к-во оборотов
n = L1 / L колеса = 0,314 / 0,176 = 1,784 оборота.
Поворот вокруг одного колеса
В этом случае у нас радиус поворота будет 20 см, а диаметр описываемой окружности 40 см. Поэтому длина описываемой окружности будет в два раза больше и как для полной окружности, так и для ее части нужно просто предыдущие вычисления умножить на два.
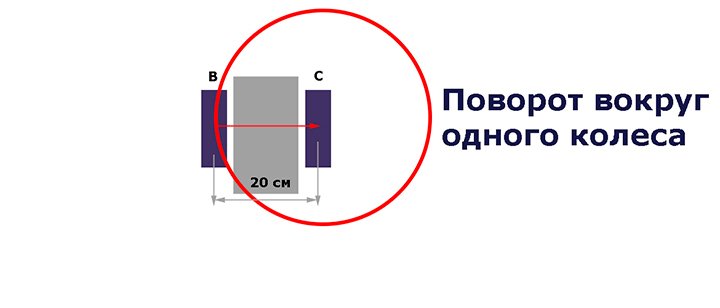
Поворот робота вокруг одного колеса
Для того чтобы сделать поворот вокруг одного колеса на 360 градусов нам понадобится в предыдущей формуле d умножить на 2, а значит и количество оборотов колеса увеличится вдвое.
L = π * 2 * d = 3.14 *2 * 0,2 м = 1,256 метра
Для робота собранного на базе набора Lego EV3 целесообразно применить программирование с помощью блока «Независимое управление моторами». Где одному мотору задать нулевое значение оборотов, а другому вычисленное. При повороте на 360 градусов это будет 7,136 оборота.
Движение по окружности произвольного диаметра
Пусть расстояние от центра окружности до середины первого колеса будет R1. Расстояние от центра окружности до середины второго колеса R2.
В этом случае мы получаем движение колес по окружностям разного диаметра за одинаковое время. Регулировать такое передвижение можно за счет разности скоростей внешнего и внутреннего колеса.
Длина окружности, которую проезжает правое колесо обозначим как L1
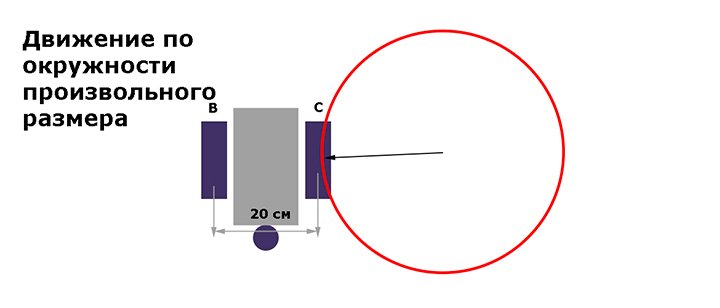
Движение робота по окружности произвольного размера
L1 = 2 * π * R1
Длина окружности для левого колеса
L1 = 2 * π * (R1 + R2)
Скорость правого колеса V1, а скорость правого колеса V2.
Время за которое заданное расстояние пройдет правое колесо t1.
t1 = L1 / V1 = (2 * π * R1) / V1
Время, за которое заданное расстояние пройдет левое колесо t2.
t2 = L2 / V2 = (2 * π * (R1 + R2)) / V2
Время проезда окружности или ее части левым и правым колесом у нас одинаковое t = t1 = t2, а значит и правые части выражений равны.
L1 / V1 = L2 / V2 ó (2 * π * R1) / V1 = (2 * π * (R1 + R2)) / V2 ó
Упрощаем выражение и получаем следующую пропорцию
V2 / V1 = (R1 + R2) / R1
Сейчас можно вычислить скорости левого и правого колеса для заданной окружности. Пусть у нас R1 = 20 см и R2 = 20 см, для упрощения скорость левого колеса возьмем 100 условных единиц. Тогда
V2 / V1 = (R1 + R2) / R1 ó 100 / V1 = (20 + 20) / 20
100 / V1 = 2 ó V1 = 100 / 2 ó V1 = 50 условных единиц.
Имея вычисленные значения скоростей можно составить программу прохождения участка. Для робота Lego EV3 можно использовать блок программирования «Независимое управление моторами». Скорость левого двигателя устанавливаем 100 у.е., скорость правого двигателя устанавливаем 50 у.е.
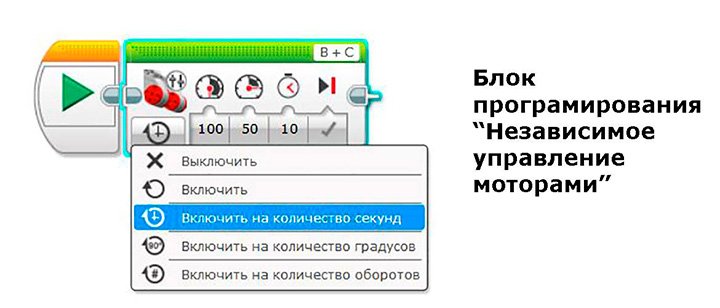
Независимое управление моторами Lego EV3 произвольная окружность
Режим устанавливаем «Включить на количество секунд». Произвольно установим 10 секунд. Для того, чтобы точно проходить заданное расстояние нужно замерить время прохождения одного круга секундомером. Зная это время можно задавать нужное нам расстояние.
Часто на соревнованиях одним из заданий является движение робота по черной линии с объездом препятствий. И для успешного преодоления трассы необходимо вычислить траекторию объезда. При помощи таких вычислений это сделать достаточно легко.