Коэффициент мощности асинхронного двигателя — от чего зависит и как изменяется
 На шильдике (информационной табличке) любого асинхронного двигателя, кроме других рабочих параметров, указан такой его параметр как косинус фи — Cosфи. Косинус фи иначе называется коэффициентом мощности асинхронного двигателя.
На шильдике (информационной табличке) любого асинхронного двигателя, кроме других рабочих параметров, указан такой его параметр как косинус фи — Cosфи. Косинус фи иначе называется коэффициентом мощности асинхронного двигателя.
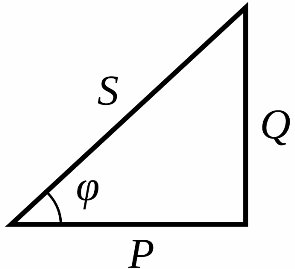
Почему этот параметр называется косинусом фи, и какое отношение он имеет к мощности? Все довольно просто: фи — это разность фаз между током и напряжением, и если изобразить графически активную, реактивную и полную мощности, имеющие место при работе асинхронного двигателя (трансформатора, индукционной печи и т. д.), то окажется, что отношение активной мощности к полной мощности — это и есть косинус фи — Cosфи, или другими словами — коэффициент мощности.
При номинальном напряжении питания и при номинальной нагрузке на валу асинхронного двигателя, косинус фи или коэффициент мощности как раз и будет равен тому значению, которое указано на его шильдике.

Например, для двигателя АИР71А2У2 коэффициент мощности будет равен 0,8 при нагрузке на валу 0,75 кВт. Но КПД этого двигателя равен 79%, следовательно потребляемая двигателем активная мощность при номинальной нагрузке на валу окажется больше 0,75 кВт, а именно 0,75/КПД = 0,75/0,79 = 0,95 кВт.
Тем не менее, при номинальной нагрузке на валу, параметр коэффициент мощности или Cosфи связан именно с потребляемой из сети энергией. Значит полная мощность данного двигателя окажется равна S = 0,95/Cosфи = 1,187 (КВА). Где P = 0,95 – потребляемая двигателем активная мощность.
При этом коэффициент мощности или Cosфи связан с нагрузкой на валу двигателя, поскольку при разной механической мощности на валу — разной будет и активная составляющая тока статора. Так, в режиме холостого хода, то есть когда к валу ничего не присоединено, коэффициент мощности двигателя не превысит, как правило, значения 0,2.
Если же нагрузку на валу начать увеличивать, то активная составляющая тока статора также будет расти, следовательно коэффициент мощности возрастет, и при близкой к номиналу нагрузке окажется равным примерно 0,8 — 0,9.
Если теперь нагрузку продолжить увеличивать, то есть нагружать вал сверх номинала, то ротор будет тормозиться, возрастет величина скольжения s, индуктивное сопротивление ротора станет вносить свой вклад, и коэффициент мощности начнет уменьшаться.
Если двигатель определенную часть рабочего времени работает вхолостую, то можно прибегнуть к снижению подводимого напряжения, например переключением с треугольника на звезду, тогда фазное напряжение на обмотках уменьшится в корень из 3 раз, снизится индуктивная составляющая от крутящегося вхолостую ротора, а активная составляющая в обмотках статора немного возрастет. Коэффициент мощности таким образом немного повысится.

Вообще, системы, питающиеся переменным током, такие как асинхронные двигатели, всегда обладают кроме активной еще и индуктивной и емкостной составляющими, поэтому каждые пол периода в сеть возвращается какая-то определенная часть энергии, называемая реактивной мощностью Q.
Этот факт вызывает у поставщиков электроэнергии проблемы: генератор вынужден поставлять в сеть полную мощность S, которая к генератору возвращается, но провода то все равно требуются соответствующего сечения под эту полную мощность, и, конечно, возникает паразитный нагрев проводов от циркулирующего туда-сюда реактивного тока. Получается, что генератор обязан поставлять полную мощность, часть которой в принципе является бесполезной.
В чисто активной форме генератор электростанции мог бы поставить потребителю гораздо больше электроэнергии, а для этого необходимо, чтобы коэффициент мощности был бы близок к единице, то есть как при чисто активной нагрузке, у которой Cosфи = 1.
Для обеспечения таких условий некоторые крупные предприятия устанавливают у себя на территории установки компенсации реактивной мощности, то есть системы из катушек и конденсаторов, которые автоматически подключаются параллельно асинхронным двигателям когда коэффициент их мощности снижается.
Получается, что реактивная энергия циркулирует между асинхронным двигателем и данной установкой, а не между асинхронным двигателем и генератором на электростанции. Так коэффициент мощности асинхронных двигателей доводят почти до 1.
Телеграмм канал для тех, кто каждый день хочет узнавать новое и интересное: Школа для электрика
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Мощность электродвигателя
Наиболее распространенным типом промышленных силовых установок являются асинхронные электродвигатели. Один из наиболее важных их параметров — мощность электродвигателя, которая в зависимости от модели может варьироваться в широких пределах. От мощности зависит тип энергосистемы, к которой двигатель можно подключить, а также тип и производительность оборудования, с которым он будет сопряжен. По этой причине, не зная мощность электродвигателя, использовать его практически невозможно.
Определение мощности электромотора по размерам сердечка статора
Если технического паспорта нет, можно произвести расчет мощности электродвигателя, исходя из размеров сердечника статора и частоты вращения. Для этого используется формула P2H = C * D1 2 / N1 * 10 -6 кВт. Здесь:
С —постоянная мощность;
D — размер внутреннего диаметра сердечника статора в см;
l — длина статора в см;
N1 — значение синхронной частоты вращения в об/мин.
Постоянная мощность зависит от частоты вращения и габаритов мотора. Она определяется по величине полюсного деления как зависимость мощности от количества полюсов и размеров полюсного деления τ, если U1 < 500В.
| Число полюсов | Полюсное деление, см | |||||
| 10 | 20 | 30 | 40 | 50 | 60 | |
| 2 | 0,4 | 1,4 | 2,2 | 2,7 | 3,15 | 3,9 |
| 4 | 1,1 | 2,2 | 3,0 | 3,5 | 3,8 | 4,2 |
| 6 | 1,7 | 2,9 | 3,8 | 4,35 | 4,8 | — |
τ = πD1 / 2р см.
2р здесь — количество полюсов в моторе.
Полученный по этой формуле результат необходимо округлить до наиболее подходящего значения в таблице. Это самый простой и доступный метод, по которому может быть осуществлен расчет мощности электродвигателя.
Подбор требуемой мощности электродвигателя
Правильно подобранная мощность электродвигателя позволяет получить оптимальные технико-экономические показатели электропривода по себестоимости, размерам, экономичности и прочим параметрам. При стабильной нагрузке на электродвигатель определить его мощность можно просто выбором по каталогу, исходя из соотношения Рн ≥ Рнагр. Здесь Рн — это мощность подбираемого двигателя, а Рнагр — предполагаемая мощность нагрузки.
Потребляемая мощность электромотора
Работая с электромоторами, нужно знать, как по шильдику определяется потребляемая мощность электродвигателя. Значение мощности Р — это не электрическая мощность мотора, а механическая мощность на валу, обозначенная в кВт.
Чтобы найти потребляемую мощность, нужно обратить внимание на КПД и cosφ двигателя, указанные на шильдике. Причем КПД может быть обозначен как просто буквами КПД, так и буквой η, что и видно на шильдике. Сначала необходимо найти активную мощность, потребляемую двигателем от сети, по формуле Ра = Р / КПД.
Т. е. в нашем случае (рис. 1) потребляемая электродвигателем из сети активная мощность равна Ра = 0,75кВт/0,75 = 1 кВт. Теперь, чтобы найти полную потребляемую мощность, нужно воспользоваться формулой S = Pa/cosφ = 1/0,78 = 1,28 кВт.
Коэффициент мощности электромотора
Коэффициент мощности электродвигателя, или cos φ — это соотношение активной и полной мощности двигателя. Определяется коэффициент мощности электродвигателя по формуле cosφ = P/S. Здесь:
Р — активная мощность в Вт;
S — полная мощность в ВА.
В большинстве случаев активная мощность имеет меньшее значение, чем полная, из-за чего коэффициент составляет меньше единицы. Только тогда, когда нагрузка будет исключительно активной, cosφ станет равен единице.
Чем ниже коэффициент мощности потребителя, тем более мощными должны быть трансформаторы, электрические станции, а также питающие линии электропередач. Кроме того, моторы с низким коэффициентом имеют меньший КПД и большие энергопотери.
Что важнее: мощность или крутящий момент?
Многие считают, что самая важная характеристика любого электродвигателя — это мощность . Про такой важный параметр, как крутящий момент, не все слышали и не все понимают е го важность для тяговых электроприводов .
В погоне за мощностью
Главная цель большинства разработчиков — достижение максимально возможной удельной мощности электродвигателя, измеряемой в кВт/кг. То есть ставится важная для многих систем электродвижения задача обеспечения высокой мощности электродвигателей при их минимальных массогабаритах. Наиболее популярный способ решения задачи – это наращивание мощности путём увеличения номинальных оборотов до нескольких десятков или даже сотен тысяч оборотов в минуту!
Однако по мере увеличения оборотов электродвигателя лавинообразно нарастают неприятные проблемы с подшипниками, механической прочностью ротора и высокочастотными потерями. Основные высокочастотные проблемы и ограничения связаны с так называемым «скин-эффектом» в обмотках, вихревыми токами Фуко в сердечнике и недостаточным быстродействием силовых ключей частотных преобразователей. Преодоление всех этих проблем приводит к существенному увеличению стоимости и технологической сложности электродвигателя.
Далее возникает вопрос: а что делать с двигателем, который крутится на бешеных оборотах? Ведь обороты, на которых требуется крутить, например, колесо или воздушный винт могут оказаться во много раз меньше!
Вращающая сила
Разработчики проекта «ЭЛЕКТРОМОМЕНТ» выбрали совершенно другой подход для решения задачи обеспечения высоких силовых характеристик при сверхмалых массогабаритах электродвигателя. Дело в том, что колесо, насос или воздушный винт на самом деле приводится в движение не мощностью, а вращающей силой!
Немного теории: для тяговых электроприводов необходимо обеспечить требуемую вращающую силу, которую называют также моментом силы или крутящим моментом (М). В таких системах вращающая сила должна дос т игать максимальн ых значений , начиная со старта.

График зависимости мощности (P) и крутящего момента (M) от оборотов (n), где: Мном — номинальный крутящий момент (в режиме S1), Н·м; Ммакс — максимальный крутящий момент (в режиме S2), Н·м; Pном – номинальная мощность (в режиме S1), кВт; Pмакс – максимальная мощность (в режиме S2), кВт; N – номинальные обороты, об/мин
Из графика зависимости мощности синхронного электродвигателя от оборотов видно, ч то его мощность не является постоянной величиной, но в рабочем диапазоне оборотов линейно растёт по мере увеличения оборотов. Для точного определения мощности (P) электродвигателя в качестве его технической характеристики выбирается оптимальная точка на графике, которая определяет номинальную мощность (Pном) на номинальных оборотах (N) .
В отличие от асинхронных, именно у синхронных электродвигателей с независимым возбуждением номинальный и максимальный крутящие моменты остаются постоянными во всём рабочем диапазоне оборотов. Постоянный номинальный крутящий момент — это одно из важнейших преимуществ синхронных электродвигателей и обеспечивается даже на минимальной мощности. На графике соответствующие крутящие моменты обозначены «Mном» и «Ммакс».
Формула зависимости мощности (P), крутящего момента (M) и оборотов (N) для многополюсного синхронного двигателя с независимым возбуждением выглядит достаточно просто:
P = kMN, где k – коэффициент, зависящий от количества пар полюсов синхронного электродвигателя.
Таким образом, увеличивая обороты синхронного электродвигателя или крутящий момент, можно пропорционально увеличивать его мощность, что, в свою очередь, приводит к пропорциональному росту удельной мощности .
Преобразование мощности в крутящий момент
Перед создателем любого тягового электропривода с применением высокооборотного электродвигателя возникает необходимость преобразования мощности в крутящий момент, сопровождающийся переходом от высоких оборотов к низким. Такое преобразование осуществляется с помощью механического редуктора .

Однако применение редуктора приводит к неизбежному увеличению сложности, масса-габаритов и стоимости электропривода на фоне снижения КПД, надёжности и рабочего ресурса. Если речь идёт о сервоприводе, то любой механический редуктор, кроме всего прочего, снижает точность позиционирования.
Кроме того, в реальных условиях увеличение номинальных оборотов электродвигателя приводит к уменьшению удельного крутящего момента (M), который в системе СИ измеряется в Н·м/кг, а в метрической — кгс·м/кг. Если хочется получить минимальные массогабариты электродвигателя, то придётся выбирать между концепциями высокой удельной мощности за счёт высоких оборотов и высоким удельным крутящим моментом на малых или сверхмалых оборотах.
Избавляемся от редуктора!

Применение тяговых синхронных электродвигателей с высоким удельным крутящим моментом позволяет существенно снизить коэффициент редукции или полностью отказаться от механического редуктора, обеспечив переход на прямой привод со всеми вытекающими отсюда преимуществами.

Удельный крутящий момент синхронных электродвигателей «ЭЛЕКТРОМОМЕНТ» серий EM , iEM и sEM в 5-10 раз выше, чем у аналогичных по мощности асинхронных и коллекторных электродвигателей! Столь высокий крутящий момент электродвигателей EM/iEM/sEM позволяет либо существенно снизить коэффициент редукции, либо полностью отказаться от механического редуктора!
Благодаря запатентованным технологиям синхронные электродвигатели серий EM/iEM/sEM в 2-5 раз компактнее и легче других синхронных (в том числе, «вентильных») и коллекторных электродвигателей с таким же крутящим моментом!
Для продвинутых: режим постоянной мощности
На графике зависимости мощности и крутящего момента от оборотов видно, что при превышении номинальных оборотов (N) синхронного электродвигателя его крутящий момент (M) начинает снижаться. Также падает и КПД. Это происходит потому, что практически любая электрическая машина обратима и может одновременно работать и как электродвигатель, и как электрогенератор. При превышении номинальных оборотов, вырабатываемое электродвигателем напряжение начинает «бороться» с питающим напряжением от частотного преобразователя. Чем больше увеличиваются обороты относительно номинальных, тем сильнее электродвигатель влияет на источник питания, снижая КПД и крутящий момент электропривода.
На практике превышение оборотов на 20-30% относительно номинальных далеко не всегда рассматриваются как нежелательный или запрещённый диапазон для синхронного электропривода. Например, в электротранспорте диапазон оборотов, превышающий номинальные, часто используется для кратковременного достижения максимальной скорости, когда фактор экономичности временно отходит на задний план. При этом современные частотные преобразователи хорошо умеют справляться с такой ситуацией и автоматически переходят в режим обеспечения постоянной мощности.
Таким образом, оптимальный выбор номинальных оборотов (N), а также допустимость и степень их превышения для конкретного синхронного электропривода — это продуманное решение разработчика электропривода, основывающееся на конкретных приоритетах.
От чего зависит мощность электромоторов? От чего зависит мощность электромоторов? только ответьте русским языком:)
наличие не менее двух обмоток;
токи в обмотках должны отличаться по фазе
оси обмоток должны быть смещены в пространстве.
В трёхфазной машине при одной паре полюсов (р=1) оси обмоток должны быть смещены в пространстве на угол 120°, при двух парах полюсов (р=2) оси обмоток должны быть смещены в пространстве на угол 60° и т. д.
Рассмотрим магнитное поле, которое создаётся с помощью трёхфазной обмотки, имеющей одну пару полюсов (р=1) (рис. 2.7). Оси обмоток фаз смещены в пространстве на угол 120° и создаваемые ими магнитные индукции отдельных фаз (BA, BB, BC) смещены в пространстве тоже на угол 120°.
Магнитные индукции полей, создаваемые каждой фазой, как и напряжения, подведённые к этим фазам, являются синусоидальными и отличаются по фазе на угол 120°.
Приняв начальную фазу индукции в фазе А (φA) равной нулю, можно записать:
Магнитная индукция результирующего магнитного поля определяется векторной суммой этих трёх магнитных индукций.
Найдём результирующую магнитную индукцию (рис. 2.8) с помощью векторных диаграмм, построив их для нескольких моментов времени.
а) При
t=0 б) При
в) При
Как следует из рис. 2.8, магнитная индукция B результирующего магнитного поля машины вращается, оставаясь неизменной по величине. Таким образом, трёхфазная обмотка статора создаёт в машине круговое вращающееся магнитное поле. Направление вращения магнитного поля зависит от порядка чередования фаз. Величина результирующей магнитной индукции
Частота вращения магнитного поля n0 зависит от частоты сети f и числа пар полюсов магнитного поля р.
n0 = (60 f) / p, [об/мин] .
Обратите внимание, что частота вращения магнитного поля не зависит от режима работы асинхронной машины и её нагрузки.
При анализе работы асинхронной машины часто используют понятие о скорости вращения магнитного поля ω0, которая определяется соотношением: